
功耗管理
模组支持的功耗模式
蜂窝通信模组支持多种工作模式,每种模式的功耗各不相同,常见的工作模式有以下几种:
ACTIVE:模组进行LTE数传、GSM通话或RTOS在运行逻辑时的状态,功耗受到具体业务和网络通信制式的影响,CPU本身功耗和网络射频功率都有所不同,故实际功耗在不同工况下会有较大差异。
IDLE:此时模组处于空闲状态,硬件正常在电,RTOS保持运行,但没有任何线程需要被执行。有业务启动或网络业务呼入时,会立即恢复运行。ECX00U系列模组会在IDLE模式下降低时钟频率,进入轻睡眠状态(关闭高速时钟,但CPU不休眠的状态)。
休眠:休眠模式的前提是模组处于空闲状态且使能autosleep,进入休眠模式后,RTOS暂停运行,模组的时钟频率会变慢,部分外设控制器(UART、SPI等)下电,同时只保留部分中断控制器,达到减小功耗的目的。
PSM:PSM模式是3GPP协议所规定的一种低功耗模式,这种模式下,模组只会周期性的唤醒并执行业务,其余时间都处于PSM休眠中。PSM休眠时,模组行为和功耗都近似于关机。
关机:模组完全下电的状态,此时BB芯片和外设控制器完全关闭,但PMIC仍是在电的。一般可由Powerkey或者RTC闹钟唤醒。
各平台工作模式支持情况和功耗:
| ECX00U | ECX00G | ECX00N | ECX00M | ECX00E | BG95 | EC21 | |
|---|---|---|---|---|---|---|---|
| IDLE(LTE FDD@64ms) | 12.34 mA | 10.1 mA | 17.36 mA | 16.72 mA | 4 mA | 18.9 mA(catm@128ms) | 16.9 mA |
| SLEEP(LTE FDD@64ms) | 2.05mA | 1.99 mA | 1.64 mA | 1.37 mA | 0.64 mA | 1.89 mA(catm@128ms) | 2.74 mA |
| SLEEP(CFUN0) | 1.29mA | 1.03 mA | 0.96 mA | 0.8 mA | 60 μA | 0.575mA | 1.00 mA |
| PSM | 15 μA | 15 μA | 不支持 | 不支持 | 5 μA | 5.10 μA | 不支持 |
| 关机 | 33 μA | 15 μA | 20 μA | 38 μA | 3 μA | 14.87 μA | 7 μA |
IDLE即是模组空闲的状态,关机则是切断电源,这两种功耗模式我们不多做赘述。实际使用中,我们经常用的休眠模式就是休眠和PSM模式。
休眠
休眠是蜂窝通信模组最常用的一种低功耗模式。模组处于空闲状态时,若autosleep被使能,则模组会进入休眠状态。此时,模组会关闭部分IP核(如外设控制器和中断控制器等)并且降低时钟频率,从而实现功耗的降低。
autosleep是一个控制是否在空闲时进入休眠的标志,其作用和原理后续会详细介绍
RTOS休眠原理
RTOS的休眠机制,基本都是配合CPU的休眠模式使用的。这个模式会关闭CPU、高速时钟和大部分外设(关闭前会保存外设的上下文)。此时SRAM保持在电,保留休眠前CPU的运行状态,因此在唤醒时,可以立即恢复运行,不会有很大的延迟。
休眠检测机制:
RTOS在上电初始化时,会默认建立一个名为IDLE的TASK,优先级为0,也就是说,这个task只在RTOS不运行其它task时才会被调度到。休眠相关处理就在IDLE TASK中被执行。RTOS在IDLE TASK中,会检测模组的外设是否正在使用,网络是否有数据等休眠条件等,满足休眠条件且autosleep使能时,控制模组进入休眠模式。
休眠机制:
RTOS的休眠一般也会指令CPU进入睡眠模式,此时,高速时钟将会关闭,外设会在保存上下文后断电,ARM的内核会停止运行,但NVIC(中断控制器)和SRAM仍可保持运行,任意中断都可将内核唤醒。
唤醒机制:
任意中断均可将内核唤醒,唤醒后内核立即恢复运行,高速时钟恢复输出,为断电的外设恢复上下文,最后恢复应用程序的运行。这种休眠-唤醒模式不仅实现了功耗的降低,还能较快恢复应用程序的运行。
休眠流程图例:
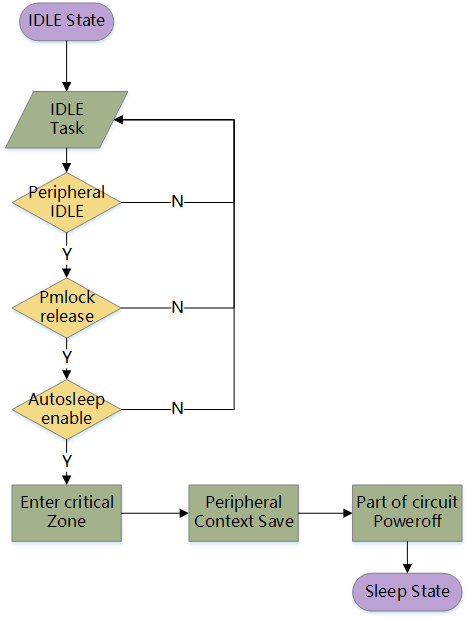
不同的RTOS可能实现休眠的逻辑不同,但原理基本类似
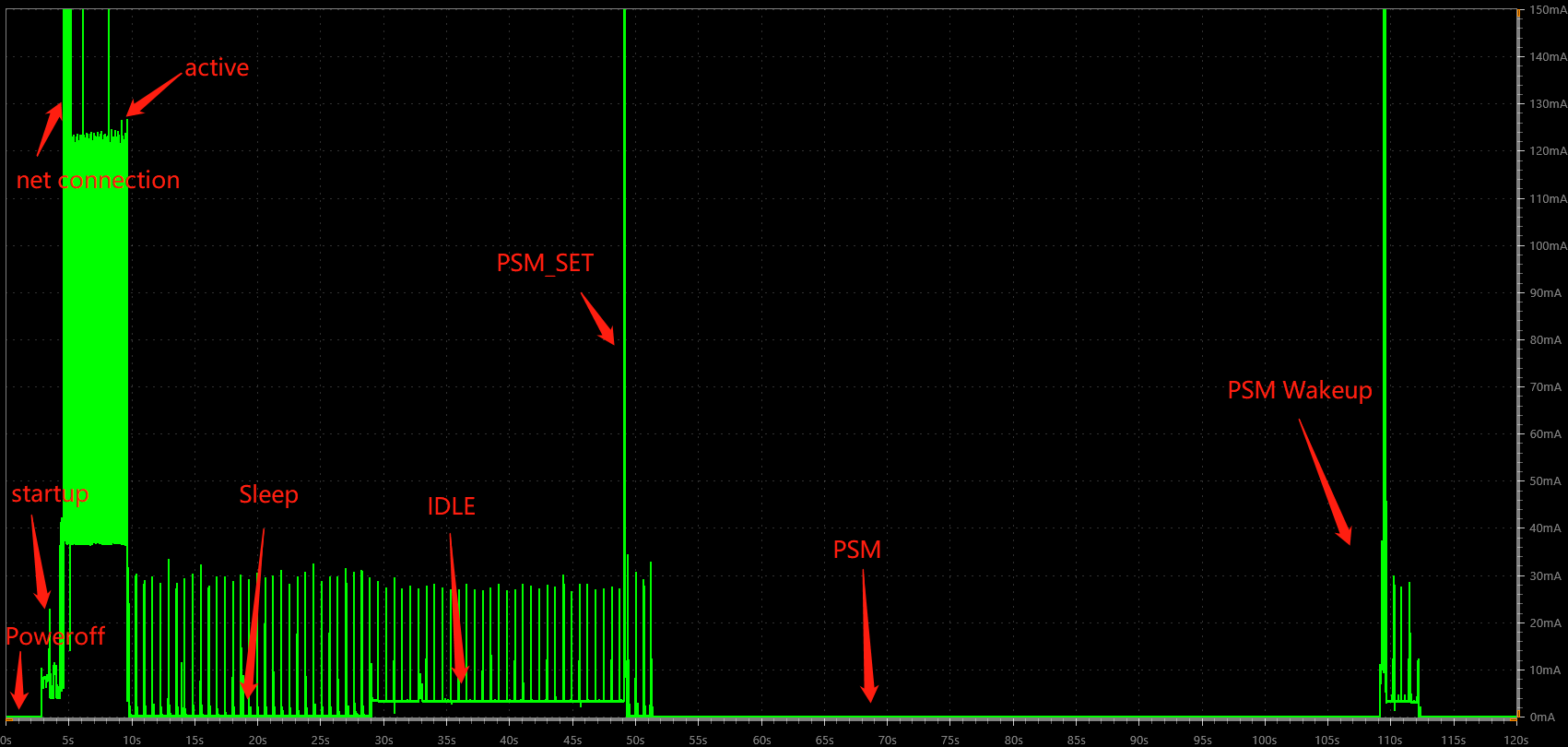
典型耗流特征:
蜂窝通信模组休眠
Quecpython支持的蜂窝通信模组要进入休眠,需要先使能休眠模式。不使能休眠模式时,模组空闲时默认处于IDLE状态。
根据前一章节可知,模块空闲时保持IDLE状态还是进入休眠状态,完全取决于是否使能autosleep。换言之,模块空闲时进入休眠时没有任何硬性阻碍,而是完全由用户控制。那么,为什么不选择默认进入休眠呢?
原因是,某些外设需要一直刷新(如LCD)。然而当模组休眠时,这些外设便不能连续工作,而是不断进行掉电->恢复的过程,严重降低了外设的刷新效率和响应速度。同时,由于休眠时采用低速时钟,任何依赖高速时钟的设备即使不掉电也无法正常工作。故而,模组空闲时会默认保持在IDLE状态,维持所有设备的正常工作。
Autosleep机制
autosleep本质上是操作RTOS休眠检测机制中的一个flag,不使能autosleep时,模组的检测机制就会指令模组保持在IDLE状态。autosleep被使能时,检测机制才认为模组处于允许休眠的状态,从而进入休眠的逻辑。
使用方法参见:自动休眠模式控制
休眠锁机制
在某些场景下,我们既要使模组能够进入休眠,又需要在特定代码段保护某些外设的正常工作,这时,我们就要引入休眠锁机制。
休眠锁本质上也是一个flag,允许创建多个。生效机制是:只要有任意一个休眠锁处于lock状态,模组就不会进入休眠。
使用方法参见:创建wake_lock锁
影响蜂窝通信模组休眠的因素
底电流
影响底电流的功耗的原因主要是系统的主频、打开的IP核的功耗,这块和PMIC 相关。
底电流的影响因素主要来源于硬件,包括模组本身和外设两部分:
模组本身的耗流因素主要包括:系统主频、打开的IP核。
外设耗电:部分外设使用模组PMIC进行供电,此时其耗流就会由模组负担。
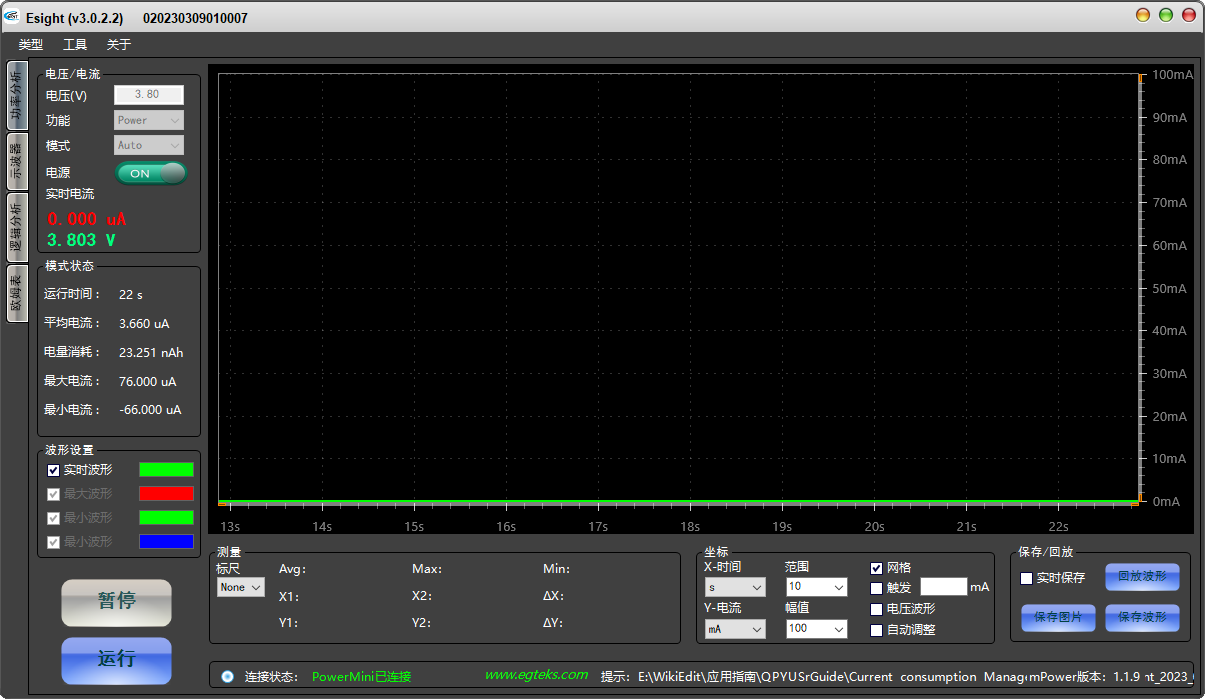
一般来说,测量底电流时,需要将网络置为CFUN0,使射频停止工作,此时测试出的电流即为模组底电流,正常情况下其特征一般近似直线,如下图:

DRX 周期&Paging
基站寻呼(paging):当网络状态产生变化/需要对UE进行呼叫/ETWS或CMAS系统发送预警时,基站会对模组发起寻呼,通知处于IDLE状态的模组开始进行通信。
DRX周期:模组网络在没有RRC连接的情况下,会周期性的监听基站寻呼,保证基站寻呼到来时能及时响应。这个监听的周期就叫做DRX周期。DRX周期一般有32ms、64ms、128ms几种,DRX周期越短,同样时间内监听基站信号的次数就越多,功耗就越高,但响应寻呼就更及时。反之,DRX周期越长,功耗越低,但响应寻呼的速度越慢。
附上Sleep(CFUN1)模式下耗流图,图中规律性的凸起即为paging,其周期即DRX周期:
信号质量
信号质量差的时候,在完成相同的网络行为时,模组需要更大的发射功率。这会在两个场景下影响模组功耗:
1.进行网络业务时,耗流会上升,除上文描述的发射功率外,如果网络业务出现了因通信质量差导致的重连或重传,整体的业务时间会被拉长,导致整体耗流进一步上升。
2.模组休眠时,每次寻呼的峰值耗流会上升,导致整体休眠电流上升。
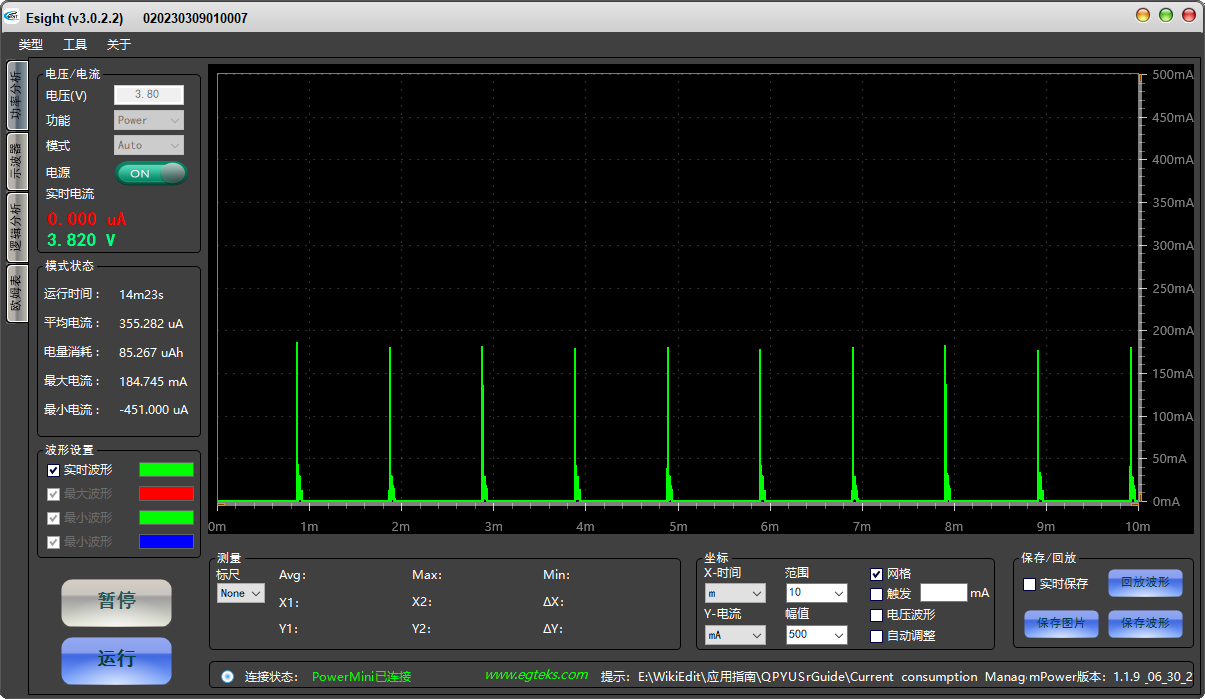
业务数据
模组在进行网络通信时,射频和CPU都会工作,从而产生较大的耗流。一般实际业务中,不会一直进行业务数据传输,常见的业务模式是心跳包。
由于在使用长连接时,如果长期不进行通信,可能会被对端认为已经离线,从而断开连接。所以业务中一般会以固定周期向对端发送一包数据,用来保活长连接。
各心跳周期下的耗流数据(LTE-FDD@64):
| ECX00U | ECX00G | ECX00M | ECX00E | EC21 | BG95 |
|---|---|---|---|---|---|
| 5min | 2.16 mA | 2.13 mA | 1.32 mA | 4.41 mA | 5 mA |
| 10min | 1.84 mA | 1.76 mA | 1.03 mA | 3.39 mA | 4.43 mA |
RRC 释放时间
无线资源控制(Radio Resource Control,RRC),又称为无线资源管理(RRM)或者无线资源分配(RRA),是包括呼叫准入控制、切换、功率控制、信道分配、分组调度、端到端QoS保障等各自独立的调配和管理算法。模组要进行业务时,需要和基站建立RRC连接,只有当RRC连接被释放时,模组才能进入休眠。
但如下图所示,这个RRC连接的生命周期中,只有最开始数秒在进行真正的数据业务。从业务完成到RRC连接释放之间,有一段耗流近似IDLE,却无法休眠的时间,这段耗流的形成和RRC的运营商策略有关:
为了避免乒乓效应(指网络状态反复切换的情况,会导致更多的系统资源占用和网络性能下降),基站并不会在网络业务完成后立即释放RRC连接,而是会等待一段时间,保证短时间内再次进行业务时无需重新建立RRC连接。RRC连接的时长会因网络环境和运营商策略而不同产生差别,在没有网络数据而RRC未释放的条件下,模组并不会进入休眠。因此RRC连接的时长会显著影响模组功耗。
休眠模式唤醒源
蜂窝通信模组进入休眠模式后,有多种模式可以唤醒模组,包括网络数据、电话、GPIO 中断、Timer等,各种方式实际上都是通过中断来唤醒系统。
Soc 唤醒机制
模组的休眠状态可以由任意中断唤醒(前提是有效的,部分中断控制器处于功耗考虑也会被关闭),唤醒后会在临界区中恢复设备上下文。此时中断控制器中存有此中断的标志,但是不会运行。等待外设恢复完毕,CPU会退出临界区,此时中断的ISR会立即运行。
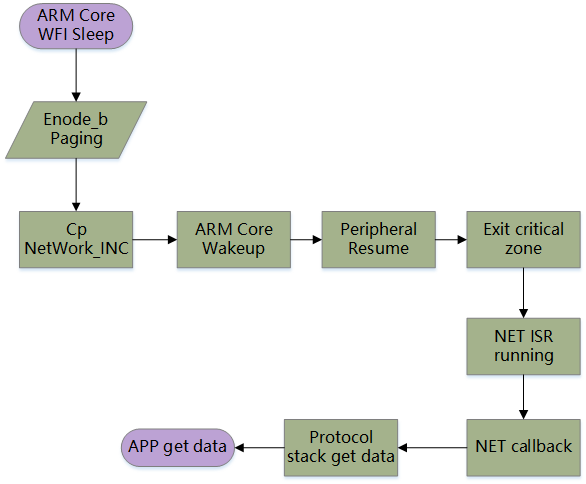
网络数据&电话唤醒
网络数据&电话:基站通过paging通知模组有呼叫请求,之后cp(或DSP)通过回调唤醒CPU,并通知CPU有网络数据到来,CPU开始将空口数据搬运进协议栈的buffer,此时上层应用(socket或电话)可从协议栈中获取到网络数据。
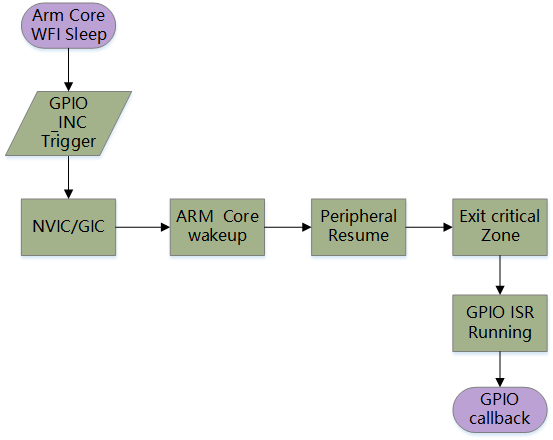
GPIO 中断唤醒
GPIO可用的前提:GPIO在模组休眠时保持供电,且其连接的中断的控制器也未被关闭。
GPIO硬件被触发时,其连接的中断控制器会立即响应并唤醒CPU,CPU会将外设的上下文恢复,然后退出临界区。此时ISR检测到GPIO的中断已经触发,会立即执行GPIO的中断函数(一般是发消息触发GPIO绑定的回调),最后触发该GPIO绑定的回调函数。
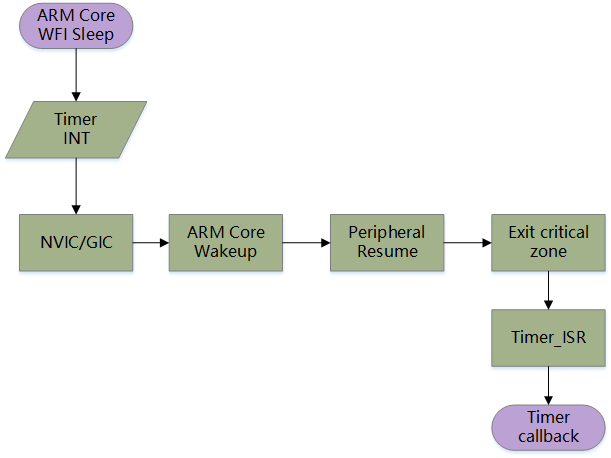
timer 唤醒
Timer超时会触发系统定时器绑定的中断,中断控制器会立即响应并唤醒CPU,CPU会将外设的上下文恢复,然后退出临界区。最后通过ISR触发timer绑定的回调。
唤醒源获取
实际上,从上面三条可以看到,凡是涉及到唤醒行为,都要通过中断控制器进行,这正是休眠模式的特征:由任意中断唤醒。由此,我们可以得出结论:不需要刻意去获取唤醒源,唤醒行为必然对应着特定中断的触发。
唤醒后业务处理
上一条已经做出结论:不需要刻意去获取唤醒源,唤醒行为必然对应着特定中断的触发。那么业务处理的原则也就很简单了:模组出休眠逻辑中,设备的上下文恢复后退出临界区,唤醒中断的ISR就会立即去执行,我们需要的业务逻辑直接由此触发即可,一般都是采用在ISR发送消息或者信号量,来触发对应业务的执行。
弱信号休眠方案
模组在网络未连接时,会主动搜索网络并尝试连接。这种机制保证了模组能以最快速度附着到网络,但也会带来一个功耗问题:当模组所在地信号弱或者无网络时,模组会一直进行搜网,此时无法进入休眠,且射频功耗也较高。
对此问题的解决方案有以下两个:
1.OOS(Out of service)机制:在模组开机/服务中断/射频从关闭状态切换到打开时会尝试驻留小区。如果网络质量较好,模组驻留到当前小区;如果网络质量不好,模组可能驻留失败。 除此之外,驻留小区在射频条件不佳的情况下,会造成下行失步,从而模组执行重新驻留。 OoS 算法定义了模组尝试重新驻留的时间,如果未能驻留成功,则模组会进入睡眠状态,睡眠一定时间后,再次尝试进行网络驻留。通常的OSS机制随着尝试网络驻留的次数增加,休眠时间也会相应增长(增加到上限就不会再增加了,按最大的睡眠时间往复尝试)。例如:
第一阶段:睡眠30s,尝试驻留到小区,重复10次;
第二阶段:睡眠45s,尝试驻留到小区,重复10次;
第三阶段:睡眠60s,尝试驻留到小区,从此依次往复此过程。
模组的的OOS机制一般会尝试多次后才停止,且该时间段内射频一直处于工作状态,相较于正常网络环境,该机制可能会产生更多的的耗流。
2.在业务中自行执行退避和重连的流程。在一定时间内网络未连接时,可手动停止搜网,如指令模组进入飞行模式等,需要重连时,恢复全功能模式即可,实际上就是业务中可自行控制时间和处理逻辑的退避模式,代码示例如下:
import net
import checkNet %%
def check_net_status():
stage, state = checkNet.waitNetworkReady(30)
if stage == 3 and state == 1:
print('Network connection successful.')
else
net.setModemFun(4)
def reconnect():
net.setModemFun(1)
典型应用
网络例程:网络主动发送心跳包&模块接收寻呼唤醒
#利用MQTT来实现心跳包和接受寻呼
from umqtt import MQTTClient
import utime
import net
import sim
import sms
import _thread
import gc
import pm
sub_path = '/a1A5W32fexl/test2/user/Text'
pub_path = '/a1A5W32fexl/test2/user/Text'
state = 0
a = 0
global c
def sub_cb(topic, msg):
global state
print("subscribe recv:")
print(topic, msg)
def err_cb(err):
print("thread err:")
print(err)
def wait_msg():
global c
while True:
try:
c.wait_msg()
except OSError as e:
print("wait_msg thread err: %s"%str(e))
break
global c
c = MQTTClient(
client_id="a1A5W32fexl.test2|securemode=2,signmethod=hmacsha256,timestamp=1675836667378|",
server="a1A5W32fexl.iot-as-mqtt.cn-shanghai.aliyuncs.com",
port=1883,
user="test2&a1A5W32fexl",
password="a5882fb77108cbd93f1413a403b31ed06d0c0e97c0ebca4b0b2f8dffe286da77",
ssl=False,
keepalive=600) #keepalive:MQTT的保活机制,此处为每10min发送一次心跳包
c.error_register_cb(err_cb)
c.set_callback(sub_cb)
print('set_callback')
pm.autosleep(1)#打开休眠模式
c.connect()#连接MQTT,本质上建立TCP长连接
print('connect')
print("MQTT is connecting")
c.subscribe(sub_path)
print("Connected to mq.tongxinmao.com, subscribed to %s" % sub_path)
c.publish(pub_path, b"hello")
print("Publish topic: %s, msg: hello" % pub_path)
_thread.start_new_thread(wait_msg, ())#监听MQTT,等待数据到来,本质上就是等待寻呼,低功耗无需做特殊处理,心跳包发送、接收时会自动唤醒模组
硬件例程1:GPIO/keypad 等外部硬件中断唤醒
import pm
pm.autosleep(1)#开启休眠
# 创建ExtInt对象
from machine import ExtInt
def fun(args):
f = open("/usr/log.txt", "a+") #以追加模式打开一个文件,低功耗时无法连接交互口,在文件中保存调试信息
f.write('### interrupt {} ###'.format(args)) # args[0]:gpio号 args[1]:上升沿或下降沿,写入文件
f.close()#关闭文件,保存写入信息
extint = ExtInt(ExtInt.GPIO1, ExtInt.IRQ_FALLING, ExtInt.PULL_PU, fun)#给GPIO1绑定回调fuction
extint.enable()#使能GPIO中断
#进入低功耗后测试触发GPIO1,然后连接USB,查看文件是否写入了正确信息。
#若文件中写入了正确的信息,说明低功耗模式下GPIO中断有效唤醒了模组,并且执行了其绑定的中断。
硬件例程2:UART唤醒和接收
"""
运行本例程,需要通过串口线连接开发板的 MAIN 口和PC,在PC上通过串口工具
打开 MAIN 口,并向该端口发送数据,即可看到 PC 发送过来的消息。
"""
import _thread
import utime
import pm
from machine import UART
'''
将主串口接到串口小板上,连接到PC
* 参数1:端口
注:选择主串口,所有平台的主串口都支持低功耗唤醒机制,其它串口具有不确定性
UART2 – MAIN PORT
* 参数2:波特率
* 参数3:data bits (5~8)
* 参数4:Parity (0:NONE 1:EVEN 2:ODD)
* 参数5:stop bits (1~2)
* 参数6:flow control (0: FC_NONE 1:FC_HW)
'''
class Example_uart(object):
def __init__(self, no=UART.UART2, bate=115200, data_bits=8, parity=0, stop_bits=1, flow_control=0):
self.uart = UART(no, bate, data_bits, parity, stop_bits, flow_control)
self.uart.set_callback(self.callback)
def callback(self, para):
if(0 == para[0]):
self.uart.write("UART WAKRUP!")#在串口RX回调中发送特定数据
def uartWrite(self, msg):
self.uart.write(msg)
def uartRead(self, len):
msg = self.uart.read(len)
utf8_msg = msg.decode()
return utf8_msg
if __name__ == "__main__":
uart_test = Example_uart()
pm.autosleep(1)
# 进入低功耗后向主串口发送数据,如果返回了"UART WAKRUP!",则串口唤醒低功耗成功,并执行了发送
# 注:部分平台会丢一包数据
硬件例程3:利用功耗锁在休眠唤醒时保护硬件时序和状态
from machine import SPI
import utime
import pm
spi_obj = SPI(0, 0, 1)
if __name__ == '__main__':
pm.autosleep(1)
lpm_fd = pm.create_wakelock("test", len("test"))#创建功耗锁,保护SPI读写
pm.wakelock_lock(lpm_fd) #功耗锁上锁,开始spi读写
r_data = bytearray(5) # 创建接收数据的buff
data = b"world" # 测试数据
ret = spi_obj.write_read(r_data, data, 5) # 写入数据并接收
spi_log.info(r_data)
pm.wakelock_unlock(lpm_fd)#释放功耗锁,允许在SPI不进行读写时进入低功耗
常见问题
1.无法正常进入休眠:排查唤醒源
| 常见唤醒源 | 备注 |
|---|---|
| 功耗锁 | 任一把锁未释放都无法休眠,需要全部释放 |
| UART | UART有数据时不可休眠 |
| USB | USB插入不可休眠 |
| Thread | Thread运行时不会进入IDLE,无法休眠 |
| SPI | SPI有数据时无法休眠 |
| LVGL | LVGL会不断刷新,休眠时应使LVGL先进入sleep |
2.正常进入休眠后底电流高,检测硬件和网络环境,需要检查的部分包括:
| 耗流源 | 备注 |
|---|---|
| PWM | PWM控制器可在休眠时使用低速时钟进行输出 |
| GPIO | GPIO休眠时能够保持对外输出,需要检查是否漏电 |
| VDD_EXT | 常开电源,休眠时需要检查漏电 |
3.网络环境导致功耗高
| 影响因素 | 备注 |
|---|---|
| 射频功耗 | 检查paging时耗流峰值和网络质量 |
| RRC周期 | 检查业务完成到RRC链接释放的时间 |
PSM 模式
什么是PSM 模式
PSM模式是一种比休眠模式功耗更低的低功耗模式,其硬件原理就是模组关机+RTC闹钟唤醒。与关机+RTC闹钟唤醒相比,PSM模式有以下两点不同:
1.RTC闹钟的唤醒时间由网络下发。
2.进入PSM模式时,模组虽然关机,但核心网仍然保留其注网信息。因此PSM唤醒时无需重新进行网络附着,联网速度更快,且功耗更低。
PSM模式是在UE空闲一定时间后关闭信号的收发,以及AS层相关功能,这相当于部分关闭,降低了天线、射频、信令处理等功耗。
PSM模式的优点是可以长时间睡眠,但缺点是无法及时应对终端接收(移动终端、MT)服务。主要应用在远程抄表和一些对实时性要求不高的场景中。
PSM 模式原理
PSM是一种比常规休眠功耗功耗更低的模式,但其运行需要网络侧支持。
启用PSM时,需要先向基站发送请求(通过ATTACH或TA_UPDATER携带定时器信息)。基站若支持进入PSM,则会在对应的REQUEST中下发定时器信息,需要注意的是,实际PSM的参数会使用基站下发的值,并不一定和我们请求的值相同。
模组会以基站下发的值来配置定时器时间,当模组进入IDLE且ACT定时器超时,模组会关闭CPU和一切射频,此时相当于部分关机,只是保留了比关机更多的唤醒源,一般包括ACT、TAU定时器和PSM_INT。功耗一般下降到微安级别。此时由于基站已经记录UE使用PSM,不会断开此UE的连接,下次如果在同一小区内重新开机,就无需拨号,直接用原有的IP等信息,进一步减少了功耗。
当PSM TAU定时器超时、RTC_alarm到期或PSM_INT等唤醒源被触发时,模组会被唤醒。由于硬件上CPU(包括SRAM)和PA均被下电,此时并不能恢复休眠前运行状态,而是要重新走开机流程。开机后可进行网络业务,网络业务完成且RRC被释放后ACT定时器编开始计时,超时便进入PSM中。
整体流程如下:

最终,在两个定时器的作用下,模组会进行周期性的休眠,唤醒切换,但只有在唤醒的时候,才能进行网络业务,休眠时是无法响应网络寻呼的。
耗流特征如下(本示例每1min唤醒一次):
ACT和TAU定时器
ACT,又称T3324,当模组完成网络业务(即RRC连接释放时)开始计时,超时后立即进入PSM。
TAU,又称T3412,当模组完成网络业务(即RRC连接释放时)开始计时,超时后,若模组在PSM模式,会将模组唤醒。
它们的时序关系如下图:
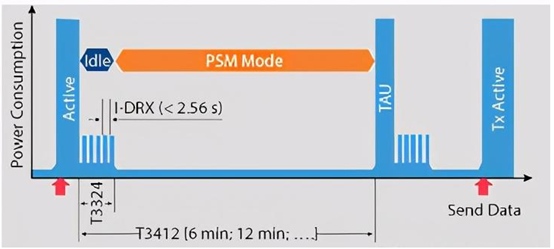
模组收到基站下发的PSM时间后,会立即启动一个RTC闹钟和一个Timer。RTC闹钟是PSM模式的唤醒源,超时时间就是T3412的值,也就是说,经过T3412时间后,模组会被RTC唤醒,进入下一个周期。Timer的超时时间是T3324,只有其超时后模组才可能进入PSM模式,即RTC闹钟将模组唤醒后,模组会保持运行的时间为T3324。
由此可见,要想模组能正常进入PSM,T3324必须小于T3412,否则便会出现RTC闹钟已经超时,模组仍无法进入PSM模式的情况。
PSM &RTC 模式下的功耗以及各平台支持情况
| ECX00U | ECX00G | ECX00M | ECX00E | BG95 | |
|---|---|---|---|---|---|
| PSM | 15 uA | 15 uA | 不支持 | 5uA | 5.10 uA |
| RTC+关机 | 33 uA | 15 uA | 38 uA | 5uA(非关机,hibernate休眠模式) | 14.87 uA |
PSM 唤醒源
PSM_INT
PSM_INT是唤醒PSM的引脚,此引脚一般都引出自PMIC。PSM_INT的功能是固化的,不需要额外的配置,进入PSM休眠后按照指定方式触发即可唤醒模组。
但对于ECx00E系列模组,没有专门的PSM_INT,而是由wakeup引脚实现此功能,wakeup引脚需要在休眠前进行配置。
RTC 闹钟
RTC闹钟能将模块从PSM模式下唤醒。其使用方法与模块关机时RTC闹钟的使用方法相同。
参见:RTC相关API说明
Powerkey
Powerkey也能唤醒PSM模式,作用原理和触发开机一致。
TAU Timer
上文描述过,TAU定时器超时会唤醒模组。
注意:BG95 的TAU Timer 和RTC alarm复用了同一个PMIC唤醒源,因此PSM和RTC不能同时使用
PSM 典型应用
PSM功耗虽低,但有以下缺点:
1.PSM启动时需要走重启逻辑,应用恢复时间远远长于autosleep;
2.产生小区切换时,无法拿到原有的网络信息,导致出现掉网和重新注网问题,反而会使耗流上升;
3.PSM休眠时不响应寻呼
所以PSM的应用场景一般满足以下三个条件:
1.定时任务间隔较长,可忽略启动时间
2.较少进行移动,不会频繁切换小区
3.对数据实时性要求不高
示例代码:
import utime
import pm
from machine import RTC
from misc import Power
import checkNet
def Business_code_example(run_time):
i = 0
for i in range(run_time):
print("Business app running")
#Business code here
utime.sleep(1)
return
def psm_try_set():
if pm.get_psm_time()[0] == 1:#开机时获取psm是否设置,如果已经使能,则无需再次进行设置
print("PSM has been enable, set pass")
return 0
else:
return pm.set_psm_time(0,1,0,1)#T3412=10min T3324=1min
def psm_failed_handle(delay_time):
utime.sleep(delay_time)#等待指定时长后,若模组仍未进入PSM模式,才会往下运行。此处执行PSM失败的处理逻辑,即代之以关机+RTC关机闹钟
rtc = RTC()
tm_rtc_tuple = rtc.datetime()
tm_rtc_second = utime.mktime((tm_rtc_tuple[0], tm_rtc_tuple[1], tm_rtc_tuple[2], tm_rtc_tuple[4], tm_rtc_tuple[5], tm_rtc_tuple[6], 0, 0))
alarm_second = tm_rtc_second + 600#RTC闹钟设为当前时间 + 10min
alarm_tuple = utime.localtime(alarm_second)
rtc.set_alarm([alarm_tuple[0], alarm_tuple[1], alarm_tuple[2], alarm_tuple[6], alarm_tuple[3], alarm_tuple[4], alarm_tuple[5], 0])
rtc.enable_alarm(1)
Power.powerDown()
if __name__ == '__main__':
psm_failed_delay_time = 60 + 30 #PSM的 T3324超时30S后,启用错误处理逻辑
lpm_fd = pm.create_wakelock("psm_lock", len("psm_lock")) #申请功耗锁
stage, state = checkNet.waitNetworkReady(30)
if stage == 3 and state == 1:
print('Network connection successful.')
psm_try_set() #网络连接成功时尝试设置PSM,如果PSM设置已经生效,则不用再次设置
else:
print('Network connection failed.')
psm_failed_delay_time = 1 #PSM依赖网络,无网络时应立即使用RTC代替之
pm.wakelock_lock(lpm_fd)#锁定功耗锁,防止业务运行过程中出现sleep时错误进入PSM模式
Business_code_example(10)#业务代码运行
pm.wakelock_unlock(lpm_fd)#业务运行完成后,释放功耗锁。模组空闲状态且T3324超时后,自动进入PSM
psm_failed_handle(psm_failed_delay_time)#运行错误处理,若模组能正常进入PSM,在sleep中就进入PSM了,该处实际的处理逻辑并不会运行
如何进入PSM
需要在联网,且确认运营商支持PSM的前提下使用。根据业务需求决定ACT和TAU的周期,通过API设置即可:
参见:PSM相关API说明
PSM_INT 应用
EC600U和BG95支持此引脚,上升沿触发,进入PSM时模组PMIC会默认配置此引脚,确保触发方式正确即可在PSM模式下唤醒模组。
ECX00E系列模组使用wakeup引脚,需要额外进行配置
弱信号PSM 方案
弱信号下PSM实际并不能保证生效,因为和基站的东西实际上未必能够正常建立,更罔论请求与下发TAU和ATC定时器是否正常。
此时我们可以主动在业务中的解决,同行方案是:设定一个最大尝试联网的时间,若超过这个时间且网络仍未能正常连接,转而使用关机+RTC alarm来实现方案。
不支持PSM 的运营商的方案
如果运营商不支持PSM,基站会设法阻碍模组进入PSM。常见的行为有三种:
- 在模组向基站请求定时器时,直接REJECT请求(此情况很少,绝大部分为后两种)。
- 下发不成对的ACT和TAU定时器,不成对的定时器无法使模组进入PSM。
- 不下发定时器
此时,只能通过RTC闹钟定时唤醒关机来实现类似的业务需求,这种方式也能达到在无需数据交互时减少耗流。但从关机状态重新开机相比PSM多了一个注网和拨号的动作,在每次唤醒注网时都会产生更多射频功耗。
此外,ECX00E系列模组在不支持PSM时需要通过pm.forcehib()方法强制进入hibernate休眠,因为此平台关机时RTC无法维持运行。
常见问题排查
1.PSM设置返回True,但无法进入
基站可能不支持PSM,确认这一点的方法是从CPlog中查看基站下发的信息,需要查看的条目为:
ATTACH_REQUEST
ATTACH_ACCEPT
TA_UPDATE_REQUEST
TA_UPDATE_ACCEPT
如图,模组设置成功后,REQUEST一定会带有成对的定时器信息,我们需要关注ACCEPT中基站是否正确下发了定时器信息。
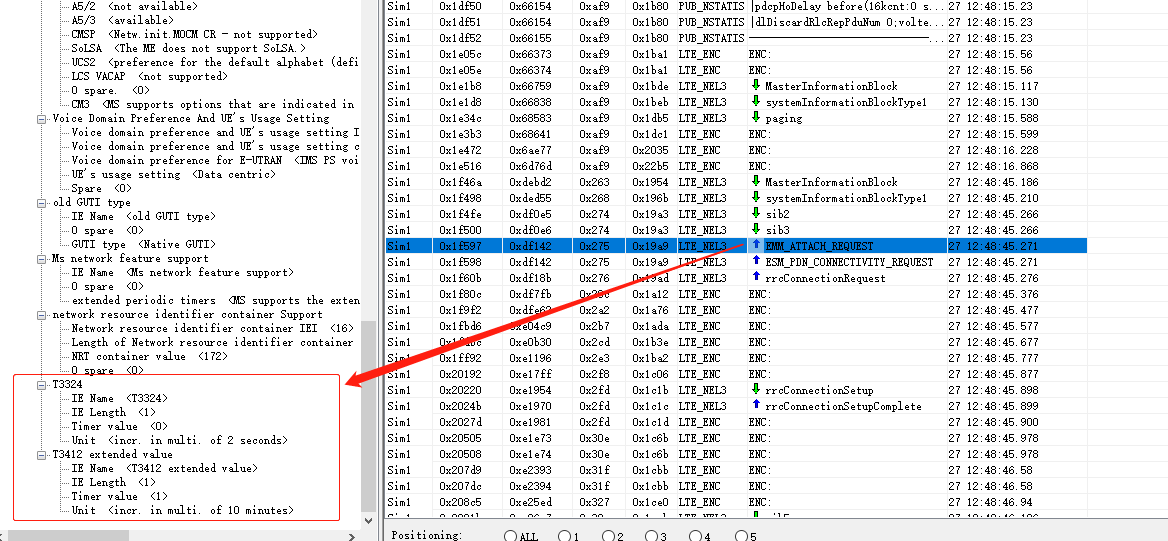
如图,网络环境不支持PSM,基站未下发成对的定时器,只下发了一个ACT定时器,这时候是不能进入PSM的:
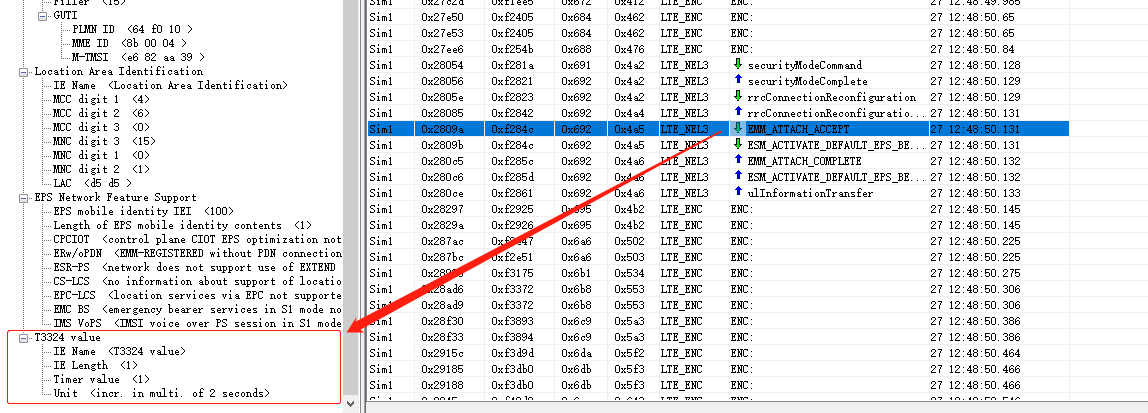
2.PSM成功进入,但休眠-唤醒周期与设置的不同
同样的,查看以上CPlog条目,基站下发的定时器周期可能不等于设置的值,且模组最终以基站下发的值为准。
常见应用场景
对讲机低功耗方案
RRC快速释放:对讲机的网络业务是不固定的,随机触发的。快速释放RRC能够保证在任何一个随机时间点,都能在对讲后快速释放RRC,从而进入休眠。
业务上,将周期性任务的时间周期尽量统一,或均为某个最小周期的整数倍。在单次唤醒中处理尽量多的周期性任务(心跳包、呼吸灯、定位等)。若周期性任务时间不统一,唤醒次数会增加,同一周期内休眠的时间占比会下降。如果唤醒太频繁,甚至无法进入休眠。
tracker 低功耗方案
RRC快速释放:tracker是一个定位器,位置是不固定的,定期进行一次定位。可使用RRC快速释放减少RRC连接保持的时长,从而降低整体耗流。
表计、门磁低功耗方案
PSM,此类产品的唤醒间隔较长,且一般不会经常移动,对数据的实时性要求不高,可采用PSM。若需要在无网络或运营商不支持的情况下使用,可采用关机+RTC闹钟定时唤醒的方案。
根据功耗需求选型
uA级耗流:必须选择支持PSM或关机RTC唤醒的型号
mA级耗流:全平台支持autosleep,根据其它需求评估适合型号
待机时间推算方法
1.首先确定电池选型,得到电池容量。
2.确定模组选型,根据规格书和实际业务计算平均待机电流。如果需要准确的待机电流,应保持整机按照业务流程运行,然后使用功耗仪测试出平均待机电流。
3.从待机时间的计算公式:待机时间 = 电池容量/ 平均待机电流
例如:已知电池容量800mah,给ECX00E系列模组供电。ECX00E系列模组在autosleep模式下保持网络连接(LTE-FDD@64)时平均待机电流约0.64mA。
则实际待机时间T=800mah/0.64mA=1250h
耗流测试指导
耗流测试概述
有多种方法可以测量模组消耗的电流。首选方法通常是使用专用功率分析仪。功率分析仪通常能够根据电流大小自动切换电流测量范围,采样频率和精度也较高。可以精确测量电流,并记录具有大动态范围的电流消耗。
除了功率分析仪外,也可以用电流表来测试模组耗流,但电流表的范围并不能动态变化,故难以记录动态范围较大的模组耗流。
需要注意的是,若要测试准确的模组电流,需要尽量排除外围电路的影响,最好将模组电源直连到功耗仪上。
耗流测试前的准备

首先,将功耗分析仪的电压调整到待测设备的额定电压(注意,这一步必须先进行,防止给待测设备输入过高电压导致损坏),将功耗分析仪的输出和GND连接到待测设备的输入引脚上(对蜂窝通信模组而言,供电引脚一般称为VBAT,部分模组有两路独立的VBAT, 分为VBAT_RF和VBAT_BB,都要连接到功耗分析仪上)。
对于上图的耗流待测设备而言,模组供电来自于红框内的VBAT,底板上其它器件的供电来自于底板DC电源或USB,因此,VBAT的耗流就完全是模组功耗。
检测耗流测试环境
在进行耗流测试前,我们应检测耗流测试的健全性。用已知功耗符合标准的待测设备,接入当前测试环境并测试耗流。
将此时获取的结果和标准耗流进行对比,若数据与标准相符合,则本测试环境是符合要求的,可以进行功耗测试。反之,需要排除影响耗流检测结果的因素。
测量关机耗流
待测设备硬件连接完毕后,不进行开机,断开USB_VBus,即可直接测量关机电流。此时,模组不工作,对外的输出引脚也全部拉低或悬空,整体平均耗流保持相对稳定,基本都在uA级。

测量模组休眠电流
完成关机电流测量后,长按powerkey开机,模组开机默认的功耗模式是IDLE,我们需要调用休眠相关的接口,让模组在空闲时进入休眠,操作方法参见autosleep相关API说明。设置完休眠后,注意断开USB,USB连接时模组无法进入休眠。
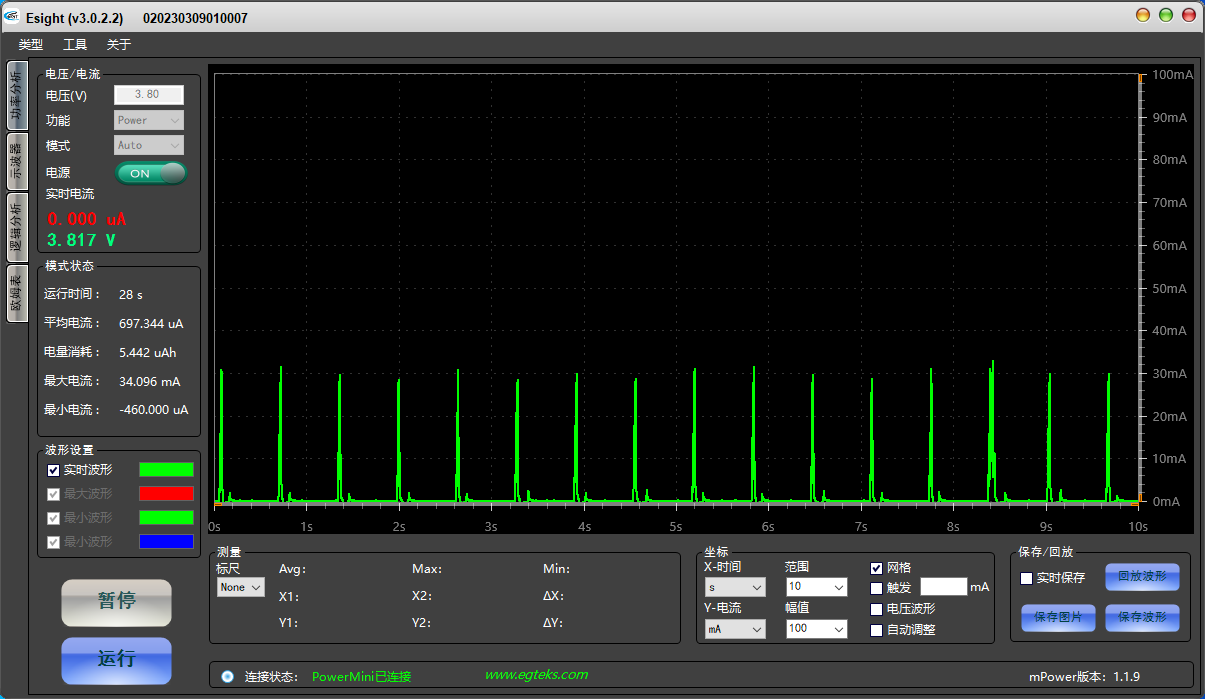
进入休眠模式后,模组应有的耗流波形会有周期稳定的凸起,这就是上文所述的DRX周期,如下图:

因为单个DRX周期的功耗具有一定随机性,此时模组平均耗流的计算应选取数个完整的DRX周期,取平均值。如上图,即是选取了三个完整周期,算出此时休眠的平均耗流。功率分析仪一般提供了特定时间段内平均耗流的计算功能,选取数个DRX周期即可。
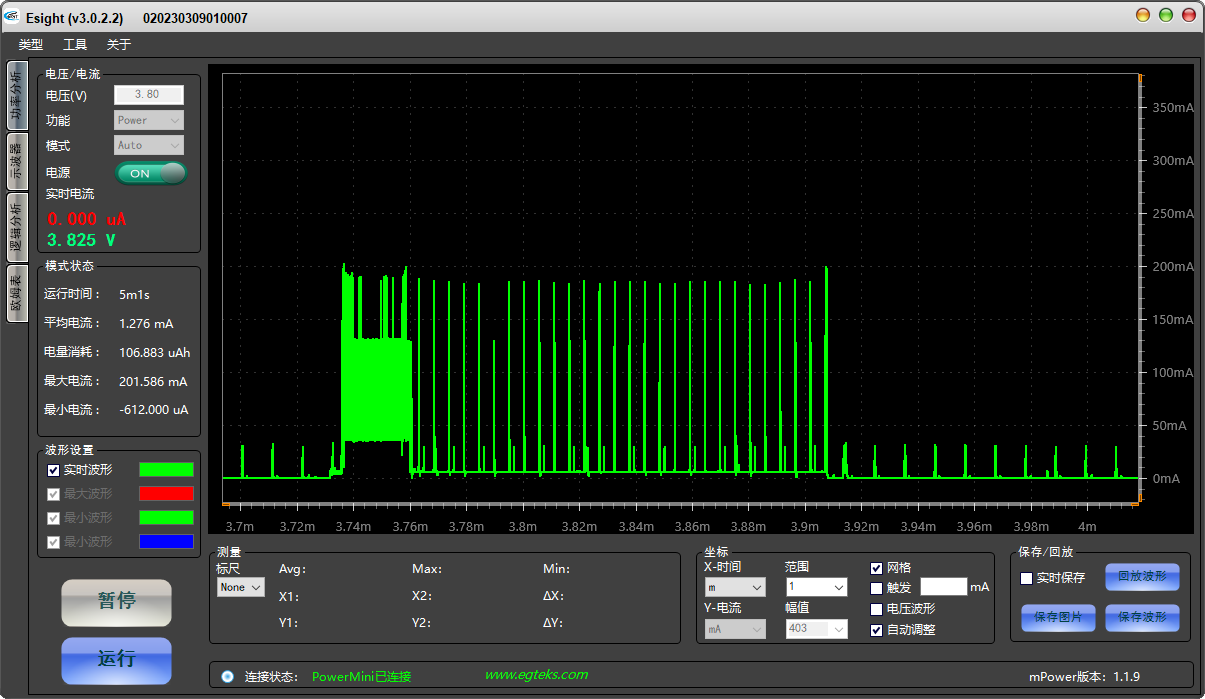
测量开机时模组的底电流
完成联网情况下耗流测试后,重新连接USB,指令模组将射频关闭,接口见此处net - 网络工作模式配置 。配置完成后,断开USB,观察耗流,此时模组空闲且射频被关闭,所耗的电流是模组休眠时可达的最低水平,这时候的电流一般可称之为底电流:

底电流近似一条稳定直线,选取一段平均电流即可。
测量PSM电流
测量PSM耗流之前,我们要设置PSM模式并检测是否生效,应用方法和检测PSM是否生效的方法可参照前文[PSM模式章节](#PSM 模式)。
确认能正常进入PSM休眠后,断开USB,我们开始测试。等待ACT定时器超时后,我们可查看PSM休眠下的底电流。
如图可见,PSM的底电流远低于普通的autosleep模式,和关机耗流的大小、特征较为相似。
PSM会定期被TAU定时器唤醒,完成网络交互,所以会有一个周期和TAU相符的耗流尖峰:
同样,PSM平均耗流需要取多个周期计算平均值
常见的耗流源以及排查思路
软件和硬件的设计失误均会导致模组耗流无法达到预期水准,以下介绍一些常见的唤醒或耗流源,以及对应的排查思路。
1.代码运行
在任何线程中,代码运行必然会导致模组定期唤醒,此时的耗流特征为:底电流符合要求,但不能一直保持休眠。如果代码持续运行或两次运行的间隔时间过短,模组就无法进入休眠。
import utime
while 1:
print("Can't sleep!")#软件耗流源例1:死循环,任何线程出现死循环时无法进入休眠
utime.sleep(1)#任务运行的间隔足够长时,在两次运行的间隔可以进入休眠,但任务再次运行时,模组将被唤醒
排查思路:分解业务逻辑,逐个关闭运行的代码块,当出现某一块逻辑关闭后,耗流恢复预期。则可定位此处逻辑是否有异常唤醒。
2.定时器
定时器,包括osTimer、RTC和硬件定时器,超时都会唤醒模组,此时的耗流特征为:底电流符合要求,但不能一直保持休眠。如果两次超时时间过短,模组会无法进入休眠。
import osTimer
def test_cb(arg):
print("Will wakeup!!")
# 创建os定时器
timer = osTimer()#软件耗流源例2:定时器,定时器超时会唤醒模组
# 启动循环定时器,未停止就会一直定期唤醒
timer.start(10000,1,test_cb)
排查思路:分解业务逻辑,逐个关闭定时器,当出现某一个定时器,耗流恢复预期。则可定位此处定时器是否有异常唤醒。
3.外设通信
外设通信,包括SPI、串口和I2C等。这些外设通信需要高速时钟的保障,因此通信时无法休眠。此时的耗流特征为:底电流符合预期,但不能一直保持休眠,唤醒行为和外设是否来数据有关。
排查思路:
1.关闭外设通信,寻找是哪一路通信引发的模组功耗异常。
2.排查对端,与模组通信的时间和频率是否符合需求。
3.如果对端发送不可控制,而模组又需求进入休眠,可在休眠前关闭响应的外设,不接收对端的数据。
4.休眠锁
休眠锁会直接锁定RTOS状态,使之在模组空闲且使能过休眠的情况下,仍保持在IDLE,而非进入sleep。此时无法进入休眠,模组空闲时耗流特征和模组IDLE耗流对应。
排查思路:
模组日志中一般可见休眠锁阻止休眠的条目,可通过日志分析是否有休眠锁未释放。
5.硬件漏电
在实际应用中,常出现某电压域漏电的情况。对整机而言,任何电压域产生漏电(例如:不经电阻接地、电压域内元件异常耗电等),就会引起整体耗流上升。此时的耗流特征为:底电流不符合预期,但开启和关闭休眠能观察到明显的耗流变化(即模组能正常进入休眠,但底电流不符合预期)。
排查思路:
1.对于模组IO能够控制的电压域,根据实际情况做拉高或拉低处理,原则是将电压域的电源切断。对于切断后耗流下降显著的电压域进行排查,检查是否有对地漏电或元器件异常耗流。
2.对于模组无法控制的电压域,可在硬件上做断开处理,对于切断后耗流下降显著的电压域进行排查,检查是否有对地漏电或元器件异常耗流。
常见的耗流器件:
LCD:背光和驱动芯片均有耗流,如果LCD持续刷新,还会导致模组无法进入休眠,休眠时LCD应停止刷新并熄屏
上拉电路:没有电阻或二极管进行扼流时,上拉电路对低电平会产生较大漏电
电平转换芯片:部分电平转换芯片输入阻抗较低,漏电流较高。
audio 功放电路:漏电流较高,不用时应关闭
触摸芯片:耗流较高,进入休眠时可指令触摸芯片进入低功耗或直接关闭
PHY网卡:耗流较高,进入休眠时应控制网卡进入低功耗(但为了保持网络连接,此设备不能关闭)