
SPI
SPI 概述
SPI,是英语Serial Peripheral interface的缩写,顾名思义就是串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在 EEPROM,FLASH,实时时钟,AD转换器,还有数字信号处理器和数字信号解码器之间。SPI,是一种高速的,全双工,同步的通信总线。SPI使用了主设备和从设备的概念。在任何给定的SPI通信中,有一个主设备和一个或多个从设备。主设备负责启动和结束通信会话。蜂窝模组SPI默认做主设备,外部设备做从设备,若需要蜂窝模组做从设备请联系厂家。
通用的SPI接口一般包含4根通讯线:
- SCK:主要的作用是主设备往从设备传输时钟信号, 控制数据交换的时机以及速率;
- SS/CS:用于主设备片选从设备,使被选中的从设备能够被主设备所访问;
- SDO/MOSI:在主设备上也被称为 Tx-Channel,作为数据的出口,主要用于 SPI 设备发送数据;
- SDI/MISO:在主设备上也被称为 Rx-Channel,作为数据的入口,主要用于SPI 设备接收数据;
SPI通信是全双工的,这意味着数据可以在两个方向上同时进行传输。对于SPI,这是通过MOSI(主设备输出,从设备输入)和MISO(主设备输入,从设备输出)线路实现的。
SPI共4种工作模式,由时钟极性(CPOL)和相位(CPHA)的不同配置决定,具体如下表所示:
| SPI Mode | CPOL | CPHA |
|---|---|---|
| 0[00] | 0 | 0 |
| 1[01] | 0 | 1 |
| 2[10] | 1 | 0 |
| 3[11] | 1 | 1 |
不同平台下SPI支持情况
BC25PA平台只支持SPI工作模式0、3,其他平台支持所有工作模式。
QuecPython SPI API说明
构造函数
class machine.SPI(port, mode, clk)
参数描述:
- port - 通道选择,int类型。选择通道前应查看WIKI,找到使用的SPI引脚对应通道。
- mode - SPI的工作模式。选择工作模式时应查看外部SPI通信芯片数据手册,查看芯片支持哪些模式,如MCP2515只支持0、3两种模式,此时只能选择模式0或者模式3。
- clk - 时钟频率。不同平台支持最高和最低时钟频率均有差异,如ASR平台最高支持52MHz时钟频率,最低812.kHz。选择时钟频率时,应在小于外部SPI通信芯片的最高支持时钟频率的条件下,尽量选择更高频率,提高通信速率。
SPI读接口
SPI.read(recv_data, datalen)
该方法用于读取数据。
参数描述:
- recv_data - 读取数据的数组,bytearray类型。数据读取成功之后,读取到的数据将写入到recv_data中。
- datalen - 读取数据的长度,int类型。使用时注意datalen不能大于recv_data的实际长度。
返回值描述:
成功返回整型值0,失败返回整型值-1。
SPI写接口
SPI.write(write_data, datalen)
该方法用于写入数据。
参数描述:
- write_data - 写入的数据,bytes类型。
- datalen - 写入的数据长度,int类型。使用时注意datalen不能大于data的实际长度。
SPI读写接口
SPI.write_read(recv_data, data, datalen)
该方法用于同时写入和读取数据。SPI通信本质上是主设备和从设备进行数据交换,在每个 Clock 周期内,SPI 设备都会发送并接收一个 bit 大小的数据(不管主设备还是从设备),相当于该设备有一个 bit 大小的数据被交换了。所以SPI设备在读取数据的同时也在写入数据,同理写入数据的时候也会读取数据。上面的SPI读接口和SPI写接口只是使用时忽略另一方的数据。
参数描述:
- recv_data - 读取数据的数组,bytearray类型。
- data - 发送的数据,bytes类型。
- datalen - 写入的数据长度,int类型。使用时注意datalen不能大于data的实际长度。
SPI总线应用示例
和MCU交互
和MCU交互时,蜂窝模组做Master(主)设备,MCU做Slave(从)设备。使用前需要MCU端提供协议,协议中应当清楚定义蜂窝模组读写数据含义。此时MCU端类似普通的SPI外设,需提供寄存器的读写含义。当蜂窝模组对寄存器写入值时,MCU可以获取蜂窝模组的指令;MCU端可以自主更新寄存器(模拟)值,等待蜂窝模组读取并获取MCU数据。
示例如下:
1.MCU端虚拟寄存器表
| 寄存器号 | 读写属性 | 寄存器数据长度 | 含义 |
|---|---|---|---|
| 0 | W | 1 | MCU GPIO1电平状态。写入1时MCU拉高GPIO1 |
| 1 | R | 1 | MCU 是否完成初始化 |
2.定义协议如下
蜂窝模组端发送:0x7F(包头)+8位控制段(0:读指令,1:写指令)+ 8位寄存器号 + 8位数据长度 + N字节数据(读指令时为空)
当MCU端收到蜂窝模组数据后,且判断数据合法后,MCU端回复:
0x7E(包头) + 8位寄存器号 + 8位数据长度 + N字节数据(写指令时为空)
3.示例数据:
蜂窝模组 -> MCU:0x7F 0x00 0x01 0x01(读取寄存器1数据)
MCU -> 蜂窝模组:0x7E 0x01 0x01 0x01 (MCU完成初始化)
SPI LCD显示屏
使用蜂窝模组连接SPI LCD共有两种方式,一种是专门的LCD SPI接口,一种是通用SPI。
蜂窝模组和LCD显示屏连接线如下图所示:
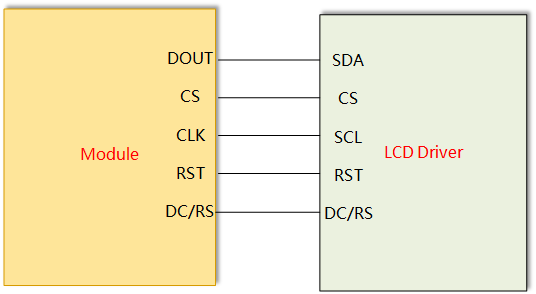
- DOUT引脚用于串行数据的传输。它是液晶显示屏与外部设备(如控制器或微控制器)之间的双向数据通信线路。
- SCL/CLK引脚用于串行数据传输时的时钟同步。它提供了数据传输的时钟信号,确保数据的同步和正确传输。
- RS/DC引脚用于指示发送给液晶显示屏的数据类型,即数据或命令。当RS/DC引脚为低电平时,表示发送的是命令;当RS引脚为高电平时,表示发送的是数据。
- RST引脚用于复位液晶显示屏,将其恢复到初始状态。当RST引脚接收到复位信号时,显示屏将重新初始化,并清除之前的状态和数据。
- CS引脚用于选择或激活液晶显示屏的芯片。当CS引脚为低电平时,表示选择该芯片进行通信或操作。
当使用LCD SPI引脚与LCD连接时,RS、RST和CS脚只能选择硬件手册中的指定引脚,如EC600U系列中CS脚为65、RST脚为64、RS脚为63。LCD SPI接口初始化LCD如下:
lcd.lcd_init(lcd_init_data, lcd_width, lcd_hight, lcd_clk, data_line, line_num, lcd_type, lcd_invalid, lcd_display_on, lcd_display_off, lcd_set_brightness)
当使用通用SPI引脚与LCD连接时,RS、RST和CS脚可根据需求任意选择合适引脚,但是引脚号需要在初始化中指定。如下:
lcd.lcd_init(lcd_init_data, lcd_width, lcd_hight, lcd_clk, data_line, line_num, lcd_type, lcd_invalid, lcd_display_on, lcd_display_off, lcd_set_brightness, lcd_interface, spi_port, spi_mode, cs_pin, dc_pin, rst_pin)
和LCD SPI引脚相比,初始化参数中增加了SPI模式、SPI口以及CS、DC、RST引脚。
具体示例可参考WIKI-LCD中的参考代码。
MCP2515 CAN控制器
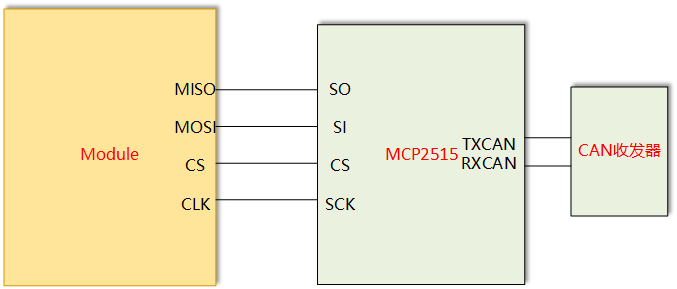
市面上大部分CAN控制器都是使用SPI总线通信,其中MCP2515是应用最为广泛的一款,所以这里详细介绍如何使用Quecpython SPI模块和MCP2515进行通信。
模组和MCP2515连接示例图如下:
以下为MCP2515驱动中使用到SPI接口的代码
# 初始化SPI,使用SPI端口0、工作模式0、6.5MHz(EC800M模组)
self.spi = SPI(0, 0, 3)
# 读单个寄存器值。INSTRUCTION.INSTRUCTION_READ:0x03(读指令)
# 参数: reg:寄存器号
def readRegister(self, reg):
write_buf = bytearray([INSTRUCTION.INSTRUCTION_READ, reg, 0x00])
read_buf = bytearray(len(write_buf))
ret = self.spi.write_read(read_buf, write_buf, len(write_buf))
if(ret != 0):
print("readRegister ret = ",ret)
return read_buf[2]
# 读连续多个寄存器值
# 参数: reg:起始寄存器号,n:连续读取寄存器数目
def readRegisters(self, reg, n):
write_buf = bytearray(2+n)
write_buf[0] = INSTRUCTION.INSTRUCTION_READ
write_buf[1] = reg
read_buf = bytearray(len(write_buf))
ret = self.spi.write_read(read_buf, write_buf, len(write_buf))
if(ret != 0):
print("readRegisters ret = ",ret)
return read_buf[2:]
# 写单个寄存器值 INSTRUCTION.INSTRUCTION_WRITE:0x02(写指令)
# 参数: reg:寄存器号,value:写入寄存器值
def setRegister(self, reg, value):
write_buf = bytearray([INSTRUCTION.INSTRUCTION_WRITE, reg, value])
ret = self.spi.write(write_buf, len(write_buf))
if(ret != 0):
print("setRegister ret = ",ret)
# 写连续多个寄存器值 INSTRUCTION.INSTRUCTION_WRITE:0x02(写指令)
# 参数: reg:寄存器号,values:写入寄存器值(bytearray)
def setRegisters(self, reg, values):
write_buf = bytearray([INSTRUCTION.INSTRUCTION_WRITE, reg]) + values
ret = self.spi.write(write_buf, len(write_buf))
if(ret != 0):
print("setRegisters ret = ",ret)
SPI总线常见问题和故障排查
1.硬件连接问题: SPI接口需要四条线 (MISO、MOSI、SCLK和CS) 进行连接,如果这些线的连接不正确,可能导致通信失败。
2.电源和地问题: 如果SPI设备的电源和地没有正确连接,也可能导致通信问题。
3.SPI模式错误: SPI有四种模式,由时钟极性和相位决定。如果主设备和从设备的SPI模式不匹配,可能会导致通信错误。
4.时钟频率过高:如果SPI的时钟频率设置得过高,可能会超过设备的能力,导致数据传输错误。
5.数据位数不匹配: SPI的数据通常是8位或16位。如果发送和接收的数据位数不匹配,可能会导致数据错误。
6.片选线控制错误: 在多从设备的系统中,如果片选线没有被正确控制,可能会导致通信混乱。
7.电平不匹配问题: 如果主设备和从设备的电平(例如,3.3V和5V)不匹配,可能会导致通信问题或设备损坏。
8.设备兼容性问题: 由于SPI没有官方标准,不同设备的实现可能会有差异。这可能导致设备之间的兼容性问题。
9.线路噪声和干扰: 如果SPI线路过长,或者环境中有高频噪声,可能会影响SPI的信号质量导致通信错误。