
看门狗
概述
对蜂窝通信模组而言,看门狗(Watchdog)是一种硬件或软件的监控机制,用于监测模组的运行状态。当模组因为外界干扰或程序错误陷入死循环时,看门狗会自动触发模组重启,从而恢复模组的运行状态。
对看门狗而言,一般用以下术语来描述它的触发和重置行为:
狗咬: 指看门狗触发模组重启的行为
喂狗: 模组重置看门狗状态的行为(目的是通知看门狗自身仍在正常运行)
硬件看门狗
硬件看门狗的原理: 典型的硬件看门狗主要包括硬件定时器、输入、输出等。其输入连接在模组IO上,输出则连接模组RESET引脚。看门狗的硬件定时器每会不断递增,超过阈值时间时,就会通过输出引脚触发模组复位(这种情况即为“狗咬”)。
正常运行的模组应通过IO周期性给看门狗输出信号,该信号在看门狗定时器到达阈值前将其重置(即“喂狗”)。因此,当模组正常保持运行时,定时器应不会递增到阈值。
当模组运行异常,无法在指定时间内重置看门狗定时器,就会触发模组RESET引脚,引发复位。
Quecpython通信模组一般内置了看门狗,业务里也可以写软件看门狗,为什么需要外置看门狗呢?因为无论是内置看门狗还是软件看门狗,在模组开机时都要走初始化流程,如果这两个看门狗尚未初始化完成就出现异常阻塞等情况,此时只有外置看门狗就才能发挥作用。
典型硬件看门狗图示:

如图,基本的硬件看门狗结构基本如此。其中WDI为输入,RESET为输出。WDI在探测到电平跳变时,判断为喂狗,清空Timer的计数。如果在一定时间内没有喂狗,Timer就会超时,通过RESET引脚触发模组重启。
软件看门狗
软件看门狗原理: 与硬件看门狗类同,只是定时器改为软件实现,一般用于监视特定线程运行,被监控的线程需要定期重置定时器。
某些情况下,当某个应保持运行的业务线程出现异常阻塞或退出,但系统整体仍保持正常,无法触发硬件看门狗相关的保护机制。软件看门狗则能对一个或几个特定的线程进行监控,在这些线程出现异常时触发重置。
典型软件看门狗图示:
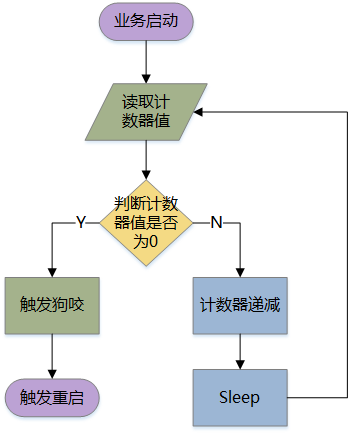
如图,软件看门狗一般在一个守护线程中运行,其基本逻辑如图。看门狗线程伴随业务启动,其运行机制类似于一个定时心跳,大部分的时候都在休眠,在心跳中完成计数器检测动作。当计数器已经归零时,则会触发reset。

它的监控对象是某个特定业务线程,也就是说,这个特定的业务线程要进行喂狗动作,即定时重置看门狗的计数器。如果这个线程异常退出或阻塞,无法再重置看门狗计数器。看门狗线程在计数器递减到0后,即会触发reset。
作为守护线程,需要注意的是。如果喂狗线程主动退出,需要同时停止看门狗线程,防止出现误触发reset的情况。
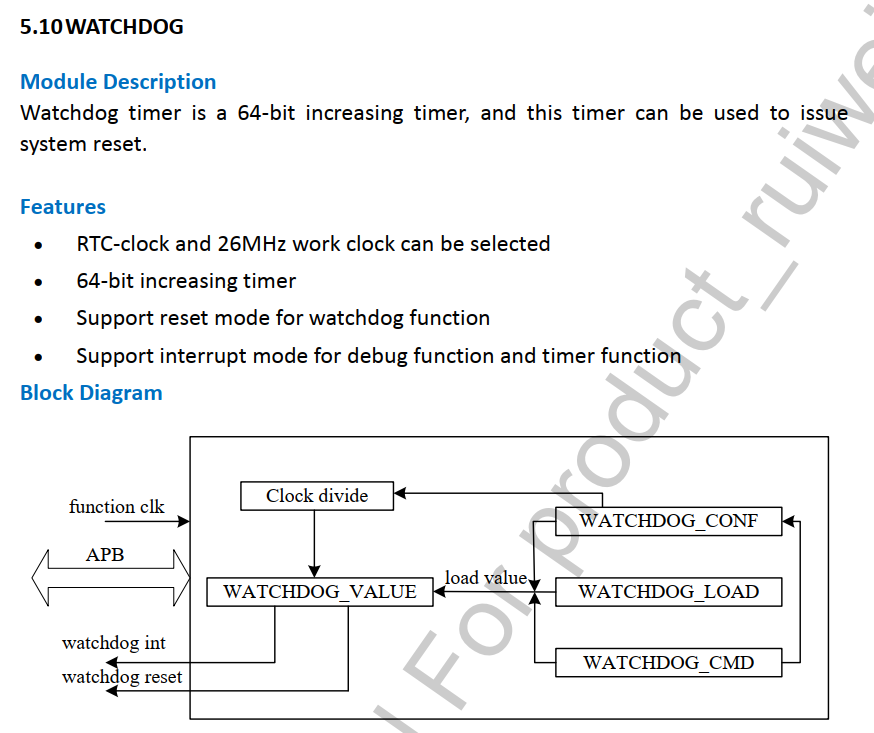
模组内置看门狗
蜂窝模组一般会内置硬件看门狗,看门狗主要功能是监控RTOS运行,狗咬时的输出可能是触发reset或者看门狗中断。喂狗机制一般是任务优先级最低的task负责执行,系统受干扰跑飞、线程或中断长期占用CPU均可触发狗咬。
相比于一般的硬件看门狗,内置看门狗一般是伴随模组的CPU启动,且需要从模组中取得时钟源(硬件看门狗一般自带时钟源)。狗咬时的动作除了触发RESET,还可选择触发看门狗中断
(用于输出调试信息或进入dump模式)。
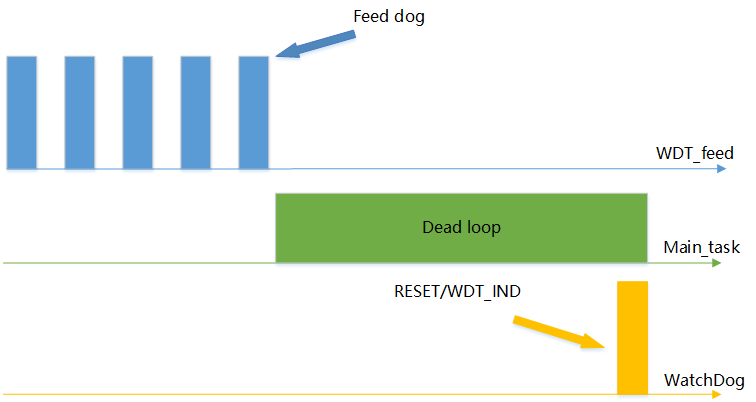
死循环导致看门狗咬死系统时序图:
正常运行时,低优先级的喂狗线程隔一段时间运行一次,绝大部分时间空闲。业务线程进入死循环后,喂狗线程无法抢占CPU,无法进行喂狗。看门狗超时后,触发reset或者看门狗中断。
底层跑飞:
因内存踩踏、电磁干扰等情况,内存中数据错乱,进而导致CPU取到错误的程序地址,出现异常的运行逻辑,产生死锁或者死循环,导致看门狗超时。
应用编程注意事项:
内置看门狗由于是针对守护RTOS设计,其喂狗动作我们无法在业务层控制,所以要规避业务长期占据CPU不释放的情况,主要是避免死锁和死循环,包括以下几点:
1.尽量排除业务中可能的死循环逻辑。
2.在业务中设置合理的阻塞或者sleep,确保低优先级任务能得到正常调度。
3.针对必须使用的循环可增加安全措施。如在循环体中增加循环计数器,即使进入了死循环,也可以在循环达到一定次数时跳出。
4.检查互斥锁,保证其使用一定是成对的。删除拿锁的线程并不会释放其已经持有的互斥锁,这种操作会导致与之互斥的线程无法运行,务必在删除线程前释放其持有的互斥锁。
内置看门狗无法覆盖的情况:
内置看门狗在开机时会进行初始化,初始化完成之前实际上并不能发挥作用。如果出现开机流程中的异常或阻塞,内置看门狗无法保护到此处。在需要多次进行开关机的场合需要注意这种缺陷,需要外置看门狗解决。
外置看门狗方案
外置看门狗原理图:


推荐的看门狗芯片:
TPS3823-33DBVR
工作电压:DC 1.1V~5V
最大喂狗时间:1.6S
复位引脚:低电平有效
耗流:15uA
外置看门狗特殊情况下喂狗:
1.开机流程中:如果开机流程时间会明显长于看门狗触发狗咬的阈值,需要在boot中触发一次WDI电平改变,或者延迟看门狗生效时间。
2.FOTA流程中:利用FOTA进度的回调,操作WDI接口电平改变。在FOTA未适配回调,无法操作IO时,需要设法停止看门狗的工作。
3.可选择最大喂狗时间较长的看门狗,使其喂狗时长大于开机和FOTA的时间。该方法对以上两种情况均适用,缺点是出现异常时需要等待较长时间才能复位。
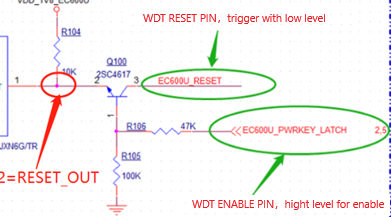
可控制看门狗是否生效的典型电路设计:
使用一个三极管,栅极接入高电平时看门狗和模组RESET 引脚导通
外置看门狗喂狗例程:
import _thread
import usys as sys
import utime as time
from machine import Pin
class WatchDog:
def __init__(self, gpio_n):
self.__pin = Pin(gpio_n, Pin.OUT, Pin.PULL_PD, 0)
self.__tid = None
def __feed(self):
while True:
self.__pin.write(1)
time.sleep_ms(200)
self.__pin.write(0)
time.sleep(1)
def start(self):
if not self.__tid or (self.__tid and not _thread.threadIsRunning(self.__tid)):
try:
_thread.stack_size(0x1000)
self.__tid = _thread.start_new_thread(self.__feed, ())
except Exception as e:
sys.print_exception(e)
def stop(self):
if self.__tid:
try:
_thread.stop_thread(self.__tid)
except:
pass
self.__tid = None
软件看门狗方案
软件看门狗一般在守护线程中运行,可覆盖业务线程异常阻塞或退出的场景(但系统保持正常运行)。
**软件看门狗示例&业务内喂狗示例:
import _thread
import usys as sys
import utime as time
from machine import Pin
from misc import Power
class WatchDog:#软件看门狗类
def __init__(self, max_count):
self.__max_count = max_count#看门狗最大计数
self.__count = self.__max_count#初始化看门狗计数器
self.__tid = None
def __bark(self):
Power.powerRestart()
def feed(self):
self.__count = self.__max_count#喂狗,重置看门狗计数器
def __check(self):
while True:#循环中检查计数器
if(self.__count == 0):
self.bark()#计数器归零时,触发重启
else:
self.__count = (self.__count - 1)#否则计数器减一
utime.sleep(10)
def start(self):
if not self.__tid or (self.__tid and not _thread.threadIsRunning(self.__tid)):
try:
_thread.stack_size(0x1000)
self.__tid = _thread.start_new_thread(self.__check, ())
except Exception as e:
sys.print_exception(e)
def stop(self):
if self.__tid:
try:
_thread.stop_thread(self.__tid)
except:
pass
self.__tid = None
wdt = WatchDog(5)#初始化软件看门狗
def th_func1():
wdt.start()#启动看门狗
while True:
print("Bussiness code running")
if(wdt != None):
wdt.feed() #在业务线程中喂狗
#bussiness code here
utime.sleep(1)
if __name__ == '__main__':
thread_id = _thread.start_new_thread(th_func1, ())
常见问题
软件看门狗选取喂狗时间间隔
有以下三个原则
1.喂狗时间间隔必须大于业务代码单次运行的时间,否则即使在业务线程中进行喂狗,也会在下次喂狗前触发重启
2.喂狗时间周期也是守护线程的心跳周期,尽量是业务线程心跳的整数倍,让模组被唤醒时同时处理业务和看门狗的心跳,减少唤醒次数,对减少耗流有重要意义。
3.喂狗时间需要匹配业务需求,太长的喂狗时间会导致异常发生时等待恢复的时间过长。
开机时间如何喂狗
如果选择的看门狗喂狗间隔小于开机时间,就需要考虑避免在开机时误触发看门狗狗咬:
1.需要在boot阶段中增加喂狗操作,添加方式与请联系移远通信技术支持。
2.开机时延迟对看门狗使能,在能够操作喂狗IO后再对硬狗做初始化。例如通过一个三极管控制看门狗输出引脚与RESET引脚的连接,开机完成后才控制这两个引脚导通,电路设计参考外置看门狗方案章节。
FOTA时如何喂狗
1.通过FOTA进度的回调操作喂狗IO
2.没有FOTA进度回调的模组,需要暂时关闭看门狗,电路设计参考外置看门狗方案章节。
如何判断是否需要外置看门狗
1.在对产品可靠性要求较高时需要外置看门狗
2.频繁开关模组的产品,触发内置看门狗失效场景的可能性较大,需要外置看门狗