加速度传感器
加速度传感器包含角加速度传感器(陀螺仪)、线加速度传感器等,能够实时检测设备的加速度、角速度和姿态等数据,以下是一些典型应用场景。
- 姿态感知:加速度传感器可以用于检测设备的姿态和方向变化。它们可以用于智能穿戴,摄影摄像等设备中,实现屏幕旋转、姿态识别和动作感应等功能。
- 运动追踪:加速度传感器可以用于追踪和记录物体的加速度和运动轨迹。在嵌入式系统中,它们可以用于运动监测器、运动手表、智能手环等设备中,实现步数统计、睡眠监测和运动轨迹记录等功能。
- 防抖动控制:加速度传感器可以用于控制设备的抖动和稳定性。它们可以用于相机防抖功能、电子稳定器、机器人控制等应用中,实现图像稳定和运动控制功能。
支持列表
Quecpython目前已支持的加速度传感器型号表
| 型号 | 接口 | 规格书 | 代码链接 |
|---|---|---|---|
| LIS2DH12 | I2C/SPI | 规格书 | 代码链接 |
| ADXL346 | I2C/SPI | 规格书 | 代码链接 |
| BMA250 | I2C/SPI | 规格书 | 代码链接 |
硬件介绍
本章节主要基于 LTE OPEN-EVB_V1.1和EC600U TE-A和LIS2DH12TR传感器模块,演示如何调试一款加速度传感器。
软件设计
工作流程
LIS2DH12 支持的功能:
单双击检测
自由落体检测
倾斜角测量
切换横屏/竖屏模式
我们使用其单击检测功能,出现单击事件,将其映射到INT1 引脚上面,其处理逻辑大致如下:
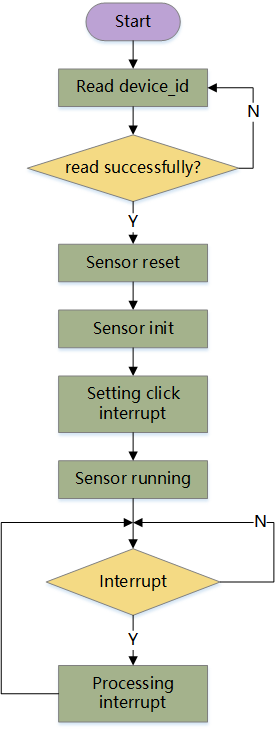
LIS2SH12 初始化步骤如下:
- 设置 CTRL_REG2 寄存器,开启高通滤波。
- 设置 CTRL_REG3 寄存器,将中断引到INT1 引脚上面。
- 设置 CTRL_REG4 寄存器,配置为满量程。
配置单击中断步骤如下:
- 配置 CLICK_CFG 寄存器,使能需要检测的感应轴,X,Y,Z。
- 配置 CLICK_THS 寄存器,设置阈值。
- 配置 TIME_LIMIT 寄存器,设置窗口限制。
- 配置 TIME_LATENCY 寄存器,设置延时。
LIS2SH12 使能传感器
- 配置CTRL_REG1 寄存器,开始使能传感器。
API参考
以下 API 实现了对lis2dh12传感器的功能抽象,用户可直接引用lis2dh12类,调用其API编写传感器应用程序。
不同加速度传感器的区别可能较大,用户若想编写自己的加速度传感器类,请先阅读对应规格书,可仿照本章源码进行开发。
类引用:
from lis2dh12 import lis2dh12
实例化:
i2c_dev = I2C(I2C.I2C1, I2C.STANDARD_MODE)
g_sensor = lis2dh12(i2c_dev,14)
参数描述:
i2c_obj- I2C对象,必传,obj类型。int_pin- 连接传感器int1的引脚gpio号,必传,int类型。dev_addr- I2C从设备地址,非必传,int类型,缺省值0x19。
注意:SDO/SA0 引脚为高电平,
dev_addr为0x19;SDO/SA0 引脚为低电平,dev_addr为0x18。
lis2dh12.sensor_reset
重置传感器。
lis2dh12.int_enable
中断使能。
参数描述:
int_type- 中断类型(可配单双击中断,自由落体中断),必传,int类型。
x轴单击:0x01,y轴单击:0x04,z轴单击:0x10,三轴单击:0x15
x轴双击:0x02,y轴双击:0x08,z轴双击:0x20,三轴双击:0x2A
自由落体:0x95。int_ths- 中断阈值,必传,int类型。time_limit- 时间限制(单双击事件),非必传,int类型,缺省值0x18。time_latency- 延时(双击事件设置),非必传,int类型,缺省值0x12。time_window- 时间窗口(双击事件设置),非必传,int类型,缺省值0x55。双击得在该段时间内完成。duration- 事件的持续时间,非必传,int类型,缺省值0x03。
int_ths用于设置触发中断的阈值。当传感器测量值(输入加速度)超过或低于该阈值时,会触发中断事件。
time_limit用于设置点击事件的时间限制。如果检测到两次输入加速度超过阈值的时间间隔小于该时间,则认为发生了点击事件。
time_latency用于设置双击事件的延时时间。在第一次点击事件之后,延时一段时间后开始检测第二次点击事件,如果第二次点击事件在延时时间内发生,则认为发生了双击事件。
time_window用于设置双击事件的时间窗口。时间窗口定义了第二次触发事件的时间范围。
duration用于指定某个事件的持续时间阈值。当事件的持续时间达到或超过该阈值时,可以触发相应的处理逻辑或中断。
lis2dh12.start_sensor
启动传感器(使能xyz轴)。
lis2dh12.read_acceleration
读取三轴加速度。
返回值描述:
acceleration- 三轴加速度(x,y,z),tuple类型,单位:G。
lis2dh12.set_int_callback
设置中断回调。(int1脚)。
lis2dh12.set_mode
设置工作模式。
参数描述:
mode- 三轴加速度工作模式,必传,int类型,0:高分辨率模式,1:普通模式,2:低功耗模式。
实验设计
- 使用LIS2DH12 传感器的 INT1 引脚产生中断。
- 轮询此引脚的状态,检测到上升沿以后, 表示中断产生,处理中断。
- 在中断函数里面读取三轴的状态。
实验代码
传感器类代码设计如下:
class lis2dh12(object):
'''
lis2dh12 class
'''
def __init__(self, i2c_dev, int_pin, slave_address=0x19):
'''
:param i2c_dev: i2c object
:param int_pin: gpio of pin which is connected with int1_pin
:param slave_address: device address
'''
self._address = slave_address
self._i2c_dev = i2c_dev
self._int_pin = int_pin
self._extint = None
self._sensor_init()
def _read_data(self, regaddr, datalen):
'''
i2c read data
:param regaddr: register address
:param datalen: length of reading data
:return: data
'''
r_data = bytearray(datalen)
reg_addres = bytearray([regaddr])
self._i2c_dev.read(self._address, reg_addres, 1, r_data, datalen, 1)
ret_data = list(r_data)
return ret_data
def _write_data(self, regaddr, data):
'''
i2c write data
:param regaddr: register address
:param data: data to write
'''
addr = bytearray([regaddr])
w_data = bytearray([data])
self._i2c_dev.write(self._address, addr, len(addr), w_data, len(w_data))
def sensor_reset(self):
'''
reset the sensor
'''
# 重置chip
self._write_data(LIS2DH12_CTRL_REG5, 0x80)
print('reboot already. {}'.format(self._read_data(LIS2DH12_CTRL_REG5,1)))
utime.sleep_ms(100)
r_data = self._read_data(LIS2DH12_WHO_AM_I, 1)
while r_data[0] != 0x33:
r_data = self._read_data(LIS2DH12_WHO_AM_I, 1)
utime.sleep_ms(5)
def _sensor_init(self):
'''
initialize the sensor
'''
self.sensor_reset()
self._write_data(LIS2DH12_CTRL_REG1, 0x77) # set ODR 400HZ ,enable XYZ.
utime.sleep_ms(20) # (7/ODR) = 18ms
self._write_data(LIS2DH12_CTRL_REG4, 0x08) # ±2g
self._write_data(LIS2DH12_CLICK_CFG, 0) # clear click_cfg
self._write_data(LIS2DH12_INT1_CFG, 0) # clear int1_cfg
self._write_data(LIS2DH12_INT2_CFG, 0) # clear int2_cfg
def int_enable(self,int_type,int_ths=0x12,time_limit=0x18,time_latency=0x12,time_window=0x55,duration=0x03):
'''
interrupt enable
:param int_type: type of interrupt
:param int_ths: threshold
:param time_limit: click_int to send this parameter, time window limit
:param time_latency: click_int to send this parameter, set the time_latency
:param duration:
'''
# single_click int
if int_type in (XYZ_SINGLE_CLICK_INT, X_SINGLE_CLICK_INT, Y_SINGLE_CLICK_INT, Z_SINGLE_CLICK_INT):
self._write_data(LIS2DH12_CTRL_REG2, 0x07) # Enable high pass filter for click function
self._write_data(LIS2DH12_CTRL_REG3, 0x80) # Bind interrupt to INT1 pin, default high level is valid
self._write_data(LIS2DH12_CTRL_REG5, 0x08) # INT1 latch
self._write_data(LIS2DH12_CLICK_CFG, int_type) # enable click_int
self._write_data(LIS2DH12_CLICK_THS, int_ths) # set threshold
self._write_data(LIS2DH12_TIME_LIMIT, time_limit) # set time_limit
# double_click int
elif int_type in (XYZ_DOUBLE_CLICK_INT, X_DOUBLE_CLICK_INT, Y_DOUBLE_CLICK_INT, Z_DOUBLE_CLICK_INT):
self._write_data(LIS2DH12_CTRL_REG2, 0x07)
self._write_data(LIS2DH12_CTRL_REG3, 0x80)
self._write_data(LIS2DH12_CTRL_REG5, 0x08)
self._write_data(LIS2DH12_CLICK_CFG, int_type)
self._write_data(LIS2DH12_CLICK_THS, int_ths)
self._write_data(LIS2DH12_TIME_LIMIT, time_limit)
self._write_data(LIS2DH12_TIME_LATENCY, time_latency)
self._write_data(LIS2DH12_TIME_WINDOW, time_window)
# 6d int
elif int_type in (MOVE_RECOGNIZE, X_MOVE_RECOGNIZE, Y_MOVE_RECOGNIZE, Z_MOVE_RECOGNIZE,POSI_CHANGE_RECOGNIZE,
X_POSI_CHANGE_RECOGNIZE,Y_POSI_CHANGE_RECOGNIZE,Z_POSI_CHANGE_RECOGNIZE,FF_RECOGNIZE):
self._write_data(LIS2DH12_CTRL_REG2, 0x00) # switch off the high pass filter
self._write_data(LIS2DH12_CTRL_REG3, 0x40)
self._write_data(LIS2DH12_CTRL_REG5, 0x08)
self._write_data(LIS2DH12_INT1_CFG, int_type) # enable 6d int
self._write_data(LIS2DH12_INT1_THS, int_ths)
self._write_data(LIS2DH12_INT1_DURATION, duration) # set duration
def start_sensor(self):
'''
start the sensor
'''
self._write_data(LIS2DH12_CTRL_REG1, 0x77) # ODR 100HZ ,enable XYZ.
utime.sleep_ms(20) # (7/ODR) = 18ms
def process_xyz(self):
'''
Read registers and convert x-axis, y-axis, and z-axis data
:return: x,y,z data
'''
data = []
ctl4 = self._read_data(LIS2DH12_CTRL_REG4, 1)[0]
big_endian = ctl4 & 0x40
# read xl,xh,yl,yh,zl,zh
for i in range(6):
r_data = self._read_data(LIS2DH12_OUT_X_L + i, 1)
data.append(r_data[0])
if big_endian:
x = data[0] * 256 + data[1]
y = data[2] * 256 + data[3]
z = data[4] * 256 + data[5]
else:
x = data[1] * 256 + data[0]
y = data[3] * 256 + data[2]
z = data[5] * 256 + data[4]
return (x, y, z)
def int_processing_data(self):
'''
handle int_processing
:return: x,y,z-axis acceleration
'''
acc = self.read_acceleration
int_src = self._read_data(LIS2DH12_INT1_SRC,1) # read INT1_SRC,clear interrupt request
return acc
@property
def _resolution(self):
"""
resolution range.
:return: range_2_G, range_4_G, range_8_G,, range_16_G.
"""
ctl4 = self._read_data(LIS2DH12_CTRL_REG4,1)[0]
return (ctl4 >> 4) & 0x03
@property
def _acceleration(self):
"""
x,y,z-axis acceleration
:return: x,y,z-axis acceleration
"""
divider = 1
accel_range = self._resolution
if accel_range == 3: # range_16_G
divider = 2048
elif accel_range == 2: # range_8_G
divider = 4096
elif accel_range == 1: # range_4_G
divider = 8192
elif accel_range == 0: # range_2_G
divider = 16384
x, y, z = self.process_xyz()
x = x / divider
y = y / divider
z = z / divider
if accel_range == 3: # range_16_G
print('range_16_G')
x = x if x <= 16 else x - 32
y = y if y <= 16 else y - 32
z = z if z <= 16 else z - 32
elif accel_range == 2: # range_8_G
print('range_8_G')
x = x if x <= 8 else x - 16
y = y if y <= 8 else y - 16
z = z if z <= 8 else z - 16
elif accel_range == 1: # range_4_G
print('range_4_G')
x = x if x <= 4 else x - 8
y = y if y <= 4 else y - 8
z = z if z <= 4 else z - 8
elif accel_range == 0: # range_2_G
print('range_2_G')
x = x if x <= 2 else x - 4
y = y if y <= 2 else y - 4
z = z if z <= 2 else z - 4
return (x, y, z)
@property
def read_acceleration(self):
'''
read acceleration
:return: x,y,z-axis acceleration
'''
while 1:
status = self._read_data(LIS2DH12_STATUS_REG,1)[0]
xyzda = status & 0x08 # if xyz data exists, set 1
xyzor = status & 0x80
if not xyzda:
continue
else:
x,y,z = self._acceleration
return (x, y, z)
def set_mode(self,mode):
"""
set work mode
:param mode: 0: High resolution mode; 1: Normal mode; 2: Low power mode;
:return: None
"""
if mode == 0:
self._write_data(LIS2DH12_CTRL_REG1, 0x77) # ODR 400HZ ,enable XYZ.
self._write_data(LIS2DH12_CTRL_REG4, 0x08) # ±2g, High resolution mode
elif mode == 1:
self._write_data(LIS2DH12_CTRL_REG1, 0x57) # ODR 100HZ ,enable XYZ.
self._write_data(LIS2DH12_CTRL_REG4, 0x08) # ±2g, Normal mode
elif mode == 2:
self._write_data(LIS2DH12_CTRL_REG1, 0x8f)
self._write_data(LIS2DH12_CTRL_REG4, 0x08) # ±2g, Low power mode
else:
print("wrong mode.")
def set_int_callback(self, cb):
self._extint = ExtInt(self._int_pin, ExtInt.IRQ_FALLING, ExtInt.PULL_PU, cb)
注意
- 中断使能接口
int_enable的参数需结合规格书和具体应用场景决定,比如希望中断不会经常误触发,则阈值参数int_ths和持续时间参数duration需要稍微设置较大,数值随具体测试效果而定。- 三轴传感器在z轴竖直向上放置且没有外力作用的时候,
x,y,z轴的加速度基本是(0,0,1),单位G。据此可以判断传感器读取计算加速度是否正常。- 开发的时候尽量用外部中断的方式来处理中断,而非轮询传感器中断寄存器的方式,后者会导致进不了低功耗模式。
主程序代码设计如下:
def int_cb(args):
print('click just happened...')
acc = dev.int_processing_data()
print("read_acceleration result: ", acc)
if __name__ == "__main__":
# initialize i2c
i2c_dev = I2C(I2C.I2C1, I2C.STANDARD_MODE)
# initialize the lis2dh12 object
dev = lis2dh12(i2c_dev, 14)
# enable single_click_interrupt
dev.int_enable(XYZ_SINGLE_CLICK_INT)
# set interrupt callback
dev.set_int_callback(int_cb)
# start sensor
dev.start_sensor()
# LP mode
dev.set_mode(2)
print("interrupt detecting...")
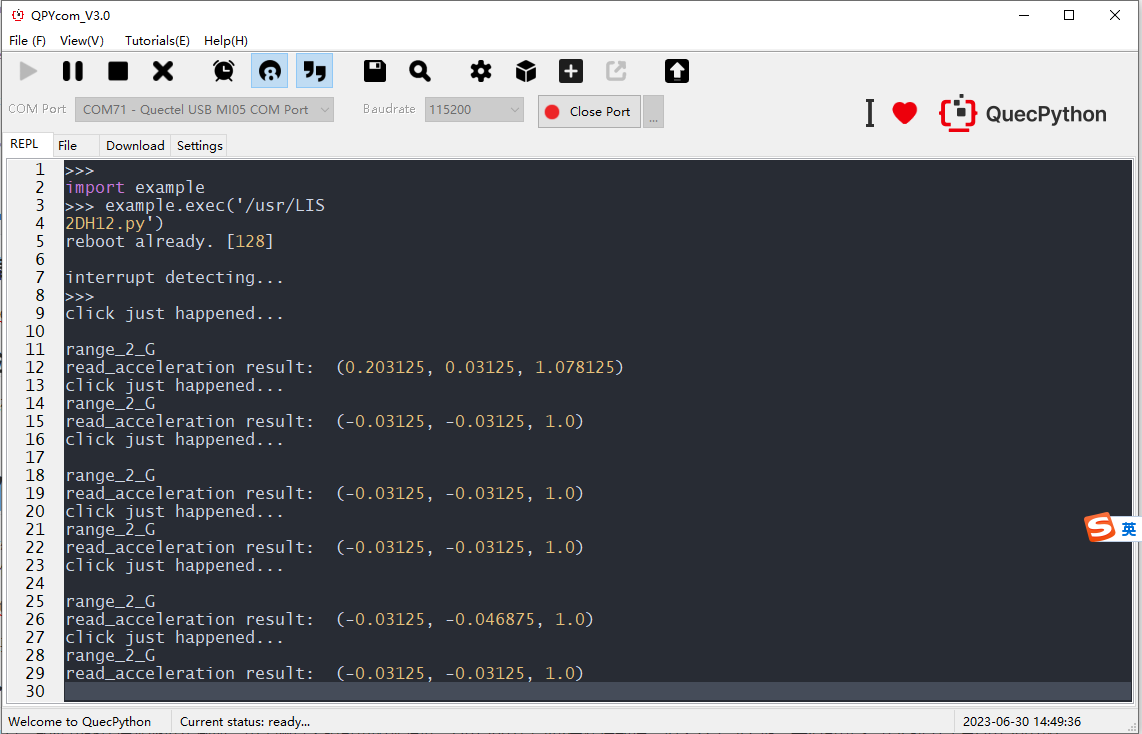
效果验证
将实验代码下载至模组中运行,单击传感器,可见交互界面出现如下图的打印,括号内打印的是触发瞬间的三个轴的加速度,单位为G: