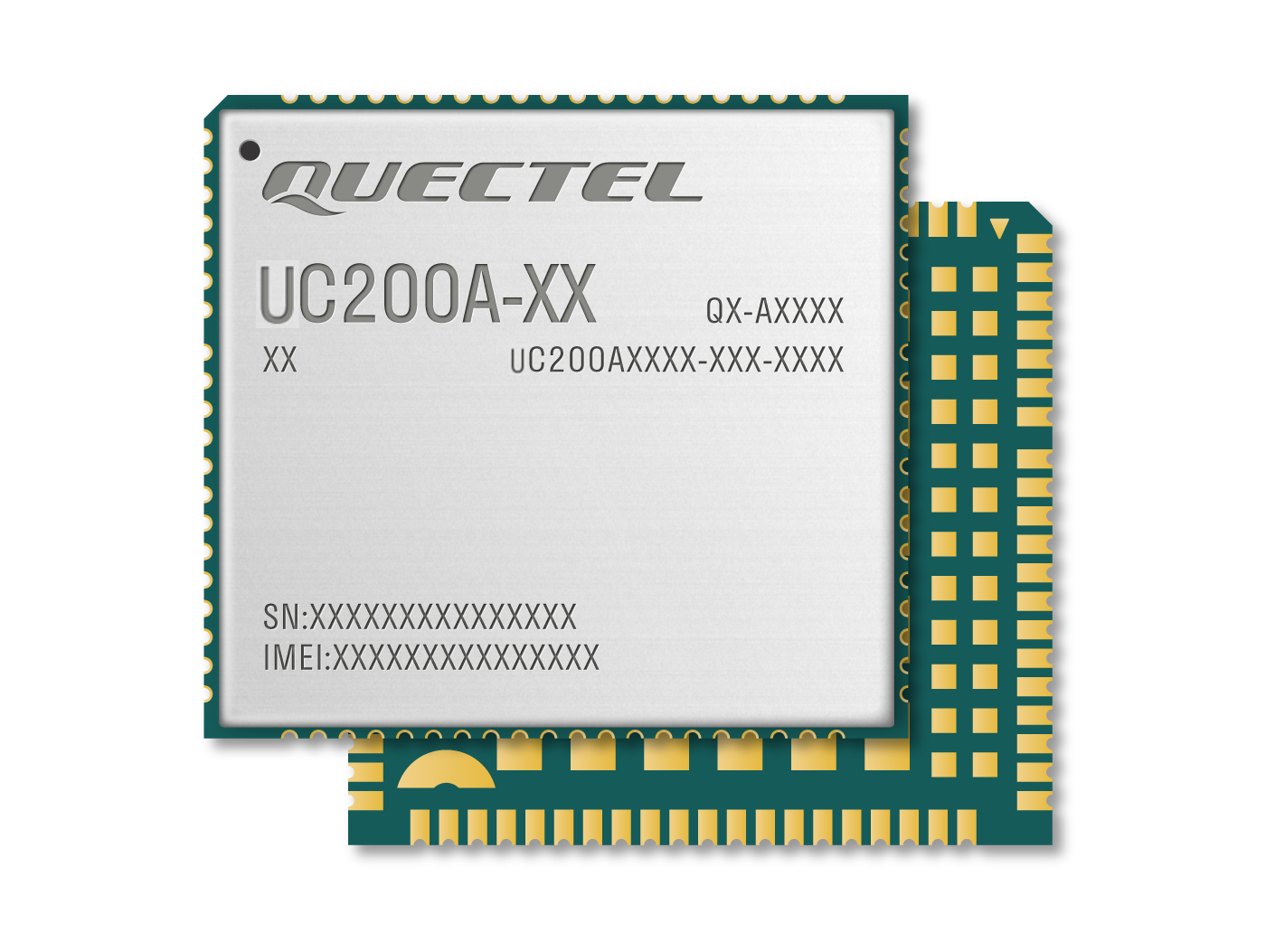
UC200A-GL是移远通信推出的UMTS/HSPA+无线通信模块,支持最大下行速率21 Mbps和最大上行速率5.76 Mbps。同时,UC200A-GL在封装上兼容移远通信和LTE Standard EC2x系列 (EC25系列和EC21系列)、EC200U系列、EC20-CE、 EC200D-CN和 EC200N-CN模块,实现了3G网络和4G网络之间的无缝切换。同时,UC200A-GL还支持GSM/GPRS/EDGE网络制式。
在 UMTS/HSPA+ 的 连 通 性 方 面 , UC200A-GL 可 满 足 不 同 国 家 和 地 区 的 频 段 覆 盖 ; 向 后 兼 容 现 存 的GSM/GPRS/EDGE网络,确保在缺乏3G和4G网络的偏远地区也能正常工作。模块采用镭雕工艺,具有外观精美、金属质感强、散热更好、信息不容易被抹除、更能适应自动化需求等优点。
UC200A-GL内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(适用于Windows7/8/8.1/10/11、Linux、Android 等操作系统下的USB 驱动),极大地拓展了其在M2M 领域的应用范围,如OTT、CPE、路由器、数据卡、平板电脑、安防以及工业级PDA 等。
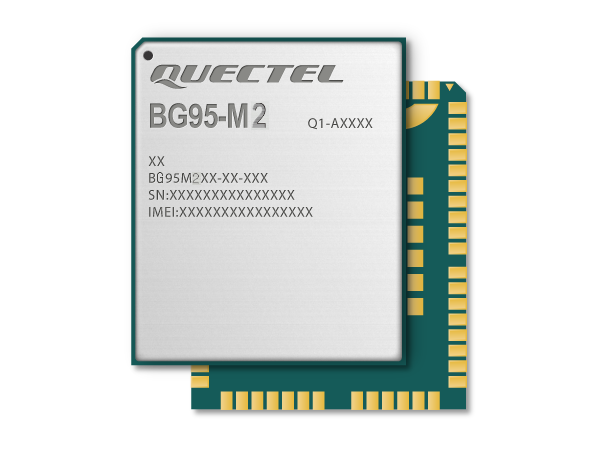
BG95 是一系列支持 3GPP Release 14 协议规范的多模(LTE Cat M1/LTE Cat NB2/EGPRS)LPWA 模块。在 LTE Cat M1 网络下,模块可支持最大上行速率 1119 kbps 和最大下行速率 588 kbps。采用置 MCP 以及支持 ThreadX 系统的 ARMCortex A7 处理器,该系列模块功耗超低;与同类产品相比,其 PSM 漏电降低 70%、eDRX 模式下功耗降低 85%。
BG95 系列拥有一整套基于硬件设计而实现的安全功能,可让受信任的应用程序直接在 Cortex A7 TrustZone 引擎上运行。其封装设计兼容移远通信 LTE 标准模块 EG91/EG95、NB-IoT 模块 BC35-G/BC95 R2.0、UMTS/HSPA 模块 UG96,方便客户快速、灵活地进行产品设计和升级。
BG95 系列的封装尺寸仅为 23.6 mm × 19.9 mm × 2.2 mm,同时还具有低功耗、高集成度、高机械强度等特点,能最大限度地方便客户进行产品开发。采用 LGA 封装,该系列模块特别适用于当代大规模生产的自动化贴片需求,易于SMT 焊接和售后维护。丰富的互联网协议、工业级标准接口以及丰富的功能,将模块的适用范围扩展到更广泛的M2M 应用上,如无线 POS、智能计量、追踪、可穿戴设备等。
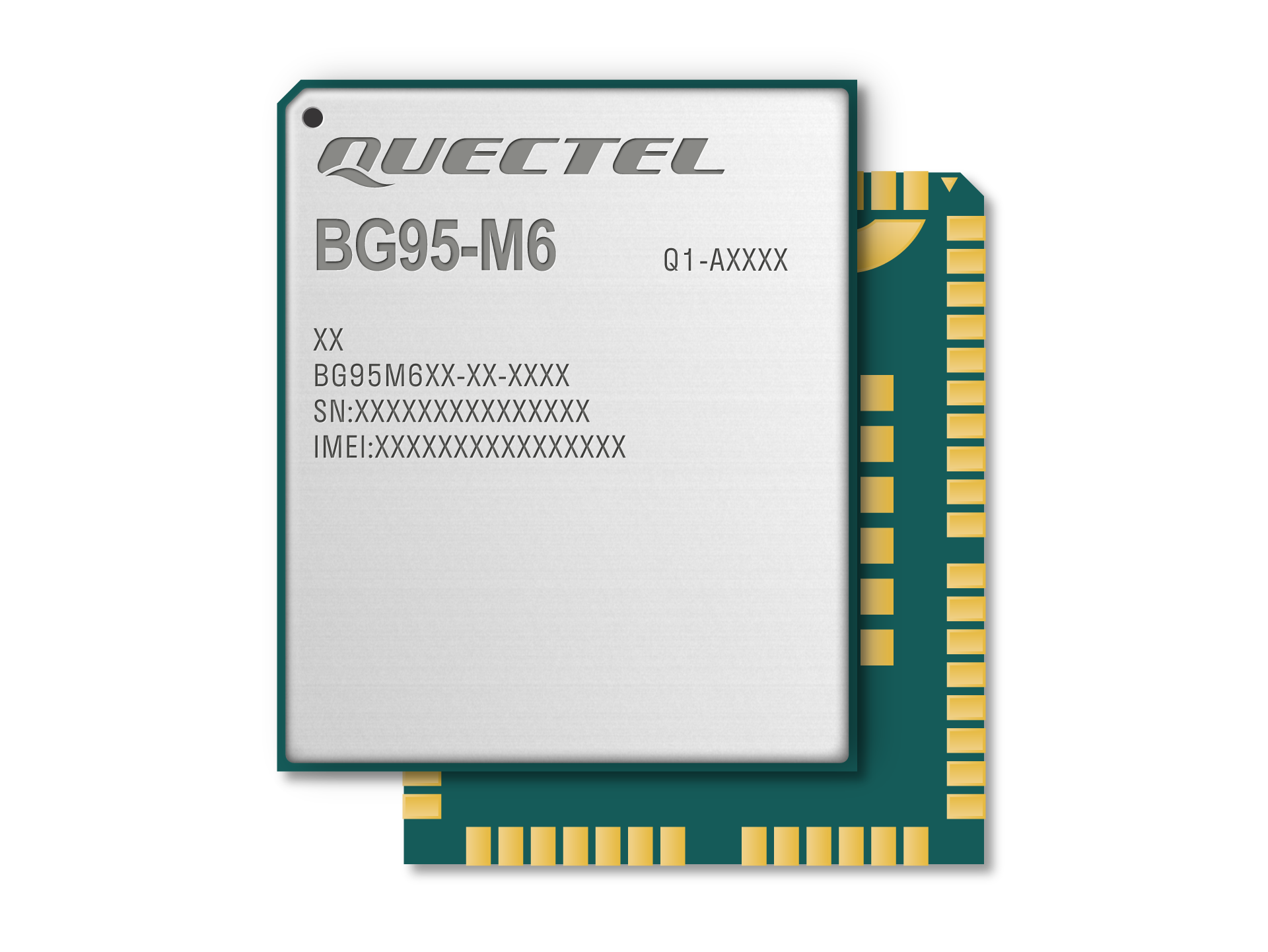
BG95 是一系列支持 3GPP Release 14 协议规范的多模(LTE Cat M1/LTE Cat NB2/EGPRS)LPWA 模块。在 LTE Cat M1 网络下,模块可支持最大上行速率 1119 kbps 和最大下行速率 588 kbps。采用置 MCP 以及支持 ThreadX 系统的 ARMCortex A7 处理器,该系列模块功耗超低;与同类产品相比,其 PSM 漏电降低 70%、eDRX 模式下功耗降低 85%。
BG95 系列拥有一整套基于硬件设计而实现的安全功能,可让受信任的应用程序直接在 Cortex A7 TrustZone 引擎上运行。其封装设计兼容移远通信 LTE 标准模块 EG91/EG95、NB-IoT 模块 BC35-G/BC95 R2.0、UMTS/HSPA 模块 UG96,方便客户快速、灵活地进行产品设计和升级。
BG95 系列的封装尺寸仅为 23.6 mm × 19.9 mm × 2.2 mm,同时还具有低功耗、高集成度、高机械强度等特点,能最大限度地方便客户进行产品开发。采用 LGA 封装,该系列模块特别适用于当代大规模生产的自动化贴片需求,易于SMT 焊接和售后维护。丰富的互联网协议、工业级标准接口以及丰富的功能,将模块的适用范围扩展到更广泛的M2M 应用上,如无线 POS、智能计量、追踪、可穿戴设备等。
BC32 是一款高性能、低功耗的 NB-IoT/GSM 双模、多频无线通信模块系列,尺寸仅为 23.6 mm × 19.9 mm × 2.2 mm,能最大限度地满足终端设备对小尺寸、多模产品的需求,同时有效帮助客户减小产品尺寸并优化产品成本。BC32 系列在设计上不仅兼容移远通信 GSM/GPRS 模块 M35,同时提供丰富的外部接口和协议栈,支持中国移动 OneNET 物联网平台,为客户的应用提供极大的便利。
BC32 系列模块包含 BC32 和 BC32-B8 两个版本以满足客户的不同应用需求。采用更易于焊接的 LCC 封装,可通过标准SMT 设备实现模块的快速生产,为客户提供可靠的连接方式,并满足复杂环境下的应用需求。
凭借紧凑的尺寸、超低功耗和双模网络的自由切换,模块可应用于烟感、无线抄表、共享单车、智能停车、智慧城市、智能安全、资产追踪、智能家电、可穿戴设备、农业环境监测以及其它诸多行业,以提供完善的短信*和数据传输服务。
移远通信 EC600M-CN 是一款专为 M2M 和 IoT 领域而设计的 LTE Cat 1 无线通信模块,支持最大下行速率10 Mbps 和最大上行速率 5 Mbps,超小封装,超高性价比。同时,在封装上兼容移远通信 EC600N-CN 模块。
EC600M-CN 采用镭雕工艺,具有外观更好看、金属质感强、散热更好、信息不容易被抹除、更能适应自动化需求等优点。
EC600M-CN 支持摄像头、LCM、矩阵键盘、音频等接口,以适配更多的智能产品终端,如智能 POS,智能手持终端等高端产品。
内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(如Windows 7/ 8/ 8.1/ 10/ 11、Linux、Android 等操作系统下的 USB 转串口驱动),极大地拓展了其在 M2M 和 IoT 领域的应用范围,如OTT、CPE、POS、数据卡、智能安全以及工业级 PDA 等。
EC800M-CN 是移远通信专为 M2M 和 IoT 领域而设计的超小尺寸 LTE Cat 1 无线通信模块,支持最大下行速率10 Mbps 和最大上行速率 5 Mbps,超小尺寸,超高性价比。同时,EC800M-CN 在封装上兼容 LTE Standard EC800E-CN、 EC800G-CN、 EC800N-CN、EC800K-CN 和 EG800K 系列模块。
EC800M-CN 采用镭雕工艺,具有外观精美、金属质感强、散热更好、信息不容易被抹除、更能适应自动化需求等优点。
EC800M-CN 内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(如 Windows 8/ 8.1/10/ 11、Linux、Android 等操作系统下的 USB 转串口驱动),极大地拓展了其在 M2M 和 IoT 领域的应用范围如云喇叭、tracker、POS、IPC、数据卡、智能安全以及工业级 PDA 等。
移远通信 EC600K-CN 是一款专为 M2M 和 IoT 领域而设计的 LTE Cat 1 bis 无线通信模块,支持最大下行速率10 Mbps 和最大上行速率 5 Mbps。同时,在封装上兼容移远通信 EC600M 系列、EC600E-CN、EC600N-CN、EC600G 系列 和 EC600U 系列模块。
EC600K-CN 采用镭雕工艺,具有外观更好看、金属质感强、散热更好、信息不容易被抹除、更能适应自动化需求等优点。
EC600K-CN 内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(如 Windows 7/ 8/8.1/ 10/ 11、Linux、Android 等操作系统下的 USB 转串口驱动),极大地拓展了其在 M2M 和 IoT 领域的应用范围,如 OTT、CPE、POS、数据卡、智能安全以及工业级 PDA 等。
EC800K-CN 是移远通信专为 M2M 和 IoT 领域而设计的超小尺寸 LTE Cat 1 无线通信模块,支持最大下行速率10 Mbps 和最大上行速率 5 Mbps,超小尺寸,超高性价比。同时EC800K-CN 在封装上兼容 LTE Standard EC800E-CN、 EC800G-CN、EC800M-CN 、EC800N-CN 和 EG800K 系列模块。
EC800K-CN 采用镭雕工艺,具有外观精美、金属质感强、散热更好、信息不容易被抹除、更能适应自动化需求等优点。
EC800K-CN 内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(如 Windows 8/ 8.1/10/ 11、Linux、Android 等操作系统下的 USB 转串口驱动),极大地拓展了其在 M2M 和 IoT 领域的应用范围,如追踪器、POS、IPC、数据卡、智能安全以及工业级 PDA 等。



2022年12月28日
11月15日,为期三天的第十八届国际物联网展·深圳站在深圳国际会展中心(宝安新馆)拉开帷幕。本届展会以”数智芯生,云端共创“为主题,来自感知层、传输层、平台层以及应用层的400多企业齐聚一堂,分享发展成果,探讨物联网产业未来趋势。

2022年12月28日
2022年11月17日 ,全球领先的物联网整体解决方案供应商移远通信重磅宣布,正式推出基于MediaTek T830平台的全新5G R16模组RG620T。

2022年12月28日
随着车联网产业的不断升级,人们对车辆安全性、舒适性、娱乐性等驾乘体验的要求越来越高,汽车座舱的智能化、网联化成了汽车产业的重要竞争力。